La pasada semana se realizó en las instalaciones de Therman (Gijón) la certificación del proyecto Demotherm ante el CDTI (Centro para el Desarrollo Tecnológico Industrial). Durante esta visita no sólo se realizó la justificación del proyecto, sino que se aprovechó para realizar más pruebas con el robot desarrollado conjuntamente entre Therman, el Grupo de Ingeniería de los Procesos de Fabricación de la Universidad de Oviedo y el B105 Electronic Systems Lab de la Universidad Politécnica de Madrid.

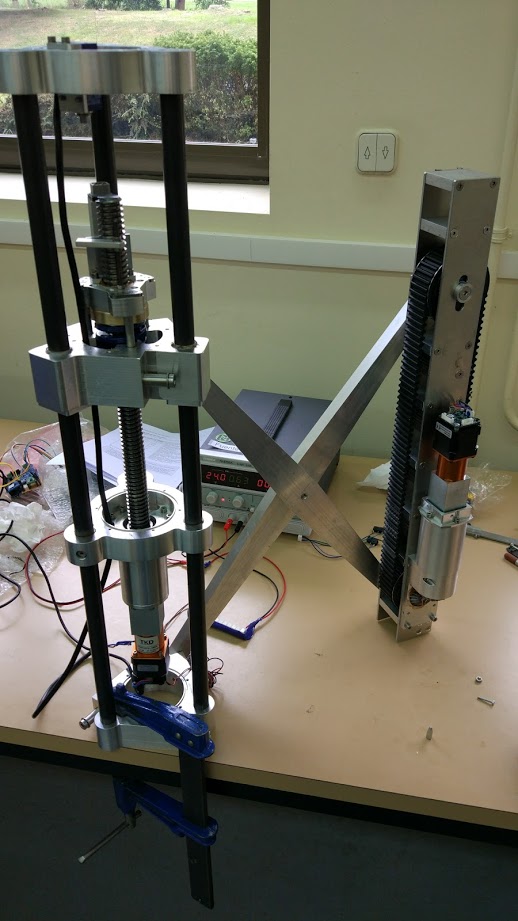
Estas pruebas se realizaron con todos los elementos del robot ya integrados (parte mecánica, hardware y software de control y bomba de agua) para evaluar el desempeño en la aplicación final para la que se ha diseñado. Además de las pruebas de corte de hormigón, se aprovechó para comprobar algunos parámetros de funcionamiento, como es la fuerza que ha de ejercer el robot contra las paredes para no caerse. Esto permite establecer los umbrales seguros de funcionamiento que habrá de mantener el robot durante su funcionamiento en los escenarios de uso.