La pasada semana se realizó en las instalaciones de Therman (Gijón) la certificación del proyecto Demotherm ante el CDTI (Centro para el Desarrollo Tecnológico Industrial). Durante esta visita no sólo se realizó la justificación del proyecto, sino que se aprovechó para realizar más pruebas con el robot desarrollado conjuntamente entre Therman, el Grupo de Ingeniería de los Procesos de Fabricación de la Universidad de Oviedo y el B105 Electronic Systems Lab de la Universidad Politécnica de Madrid.
Estas pruebas se realizaron con todos los elementos del robot ya integrados (parte mecánica, hardware y software de control y bomba de agua) para evaluar el desempeño en la aplicación final para la que se ha diseñado. Además de las pruebas de corte de hormigón, se aprovechó para comprobar algunos parámetros de funcionamiento, como es la fuerza que ha de ejercer el robot contra las paredes para no caerse. Esto permite establecer los umbrales seguros de funcionamiento que habrá de mantener el robot durante su funcionamiento en los escenarios de uso.
Title: A WSN-Based Intrusion Alarm System to Improve Safety in Road Work Zones
Authors: Jose Martin, Alba Rozas, and Alvaro Araujo
Published in: Journal of Sensors
Date of Publication: Jun 2016
Digital Object Identifier : 10.1155/2016/7048141
Web: https://www.hindawi.com/journals/js/2016/7048141/
Road traffic accidents are one of the main causes of death and disability worldwide. Workers responsible for maintaining and repairing roadways are especially prone to suffer these events, given their exceptional exposure to traffic. Since these actuations usually coexist with regular traffic, an errant driver can easily intrude the work area and provoke a collision. Some authors have proposed mechanisms aimed at detecting breaches in the work zone perimeter and alerting workers, which are collectively called intrusion alarm systems. However, they have several limitations and have not yet fulfilled the necessities of these scenarios. In this paper, we propose a new intrusion alarm system based on a Wireless Sensor Network (WSN). Our system is comprised of two main elements: vehicle detectors that form a virtual barrier and detect perimeter breaches by means of an ultrasonic beam and individual warning devices that transmit alerts to the workers. All these elements have a wireless communication interface and form a network that covers the whole work area. This network is in charge of transmitting and routing the alarms and coordinates the behavior of the system. We have tested our solution under real conditions with satisfactory results.
Este proyecto tiene como objetivo desarrollar un sistema que estime la ocupación de los vehículos para implementarlo en los sistemas de cobro inalámbricos en los peajes. El fin es fomentar el uso compartido de los vehículos aplicando distintas tarifas en función de la cantidad de pasajeros de cada vehículo.
Este proyecto está ubicado en la convocatoria Plan Avanza 2014 (actualmente AEESD), con las siguientes características:
Título: Desarrollo de un sistema de control automático de la ocupación en vehículos para aumentar la eficiencia energética en peajes
Código: TSI-100501-2014-1
Duración: 2014-2016
Consorcio: Valoriza Conservación de Infraestructuras y Universidad Politécnica de Madrid.
Entidad financiadora: Ministerio de Industria, Energía y Turismo
El sistema para el control de la ocupación de vehículos consistirá en el desarrollo e integración de varias técnicas de sensorización no invasivas. Estos nodos deberán estar alimentados de manera autónoma y durante largos periodos de tiempo, pues lo ideal es que no tengan que reemplazarse. Además, las comunicaciones entre los sensores deben ser fiables y seguras, puesto que tratan con datos críticos.
El proyecto DEPERITA (DEtection PERImetral system for lineal TrAffic works) está siendo actualmente desarrollado en el laboratorio B105. El sistema busca desarrollar un sistema que mejore la seguridad en obras de mantenimiento de carreteras. En estos trabajos, es habitual llevarlos a cabo sin cerrar la calzada, cortando sólo parte de los carriles, con el fin de no interrumpir completamente el tráfico. Sin embargo, en estos casos, los trabajadores están expuestos al tráfico, ya que los coches circulan muy cerca de ellos y cabe la posibilidad de que algún vehículo se introduzca en la zona cerrada al tráfico, en la que se encuentran los trabajadores. Para reducir la posibilidad de accidente en estos casos, se ha planteado desarrollar un sistema que alerte a los trabajadores en caso de que algún vehículo invada la zona de trabajo.
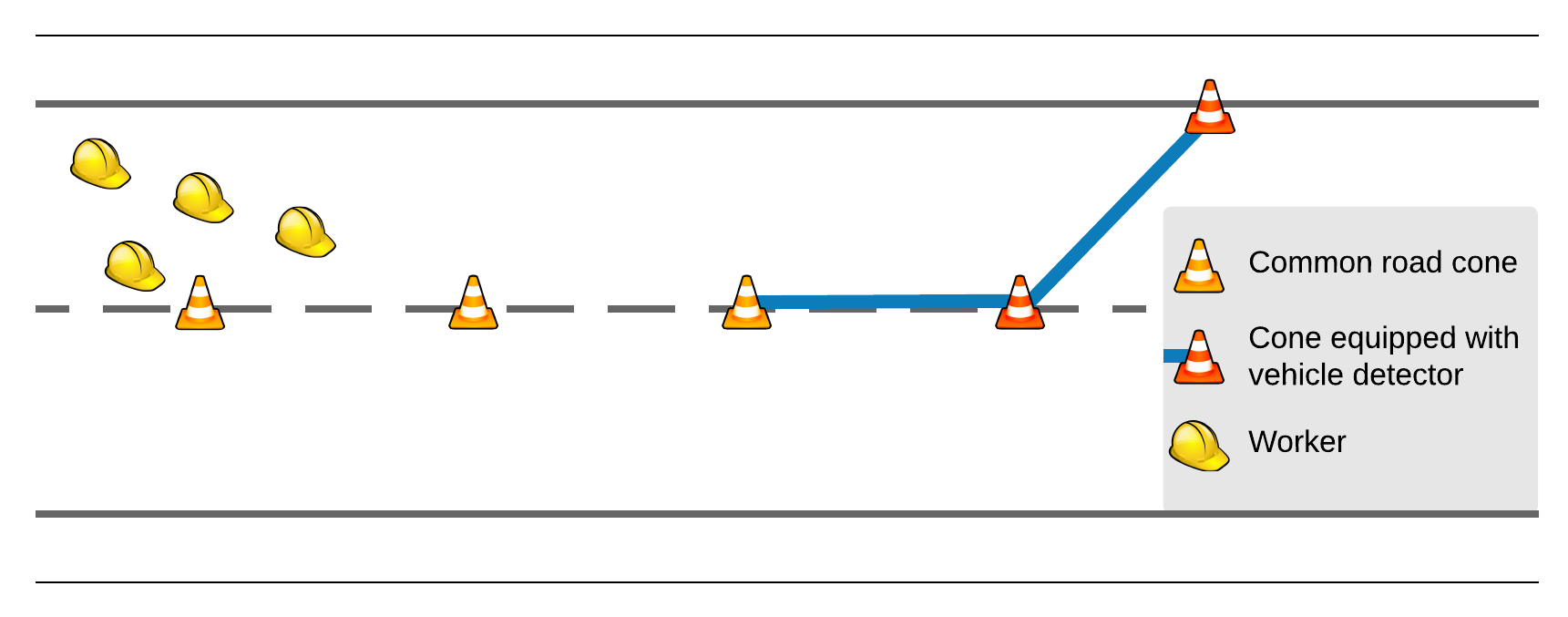
La detección de los vehículos se realiza mediante unas balizas o detectores que se acoplarán a los conos empleados para realizar el corte del tráfico. Las balizas se encargarán de, si algún vehículo cruza ,la zona delimitada, avisar a todos los trabajadores a través de un reloj que cada uno de ellos lleva puesto. Todas estas balizas y relojes forman una red inalámbrica en la banda conocida como SRD (Short Range Devices) de 868 MHz. Esta se encarga de distribuir los avisos de peligro, activar o desactivar la detección de vehículos, e informar del estado de los dispositivos.
Esquema reducido de un despliegue objetivo.
Cuando algún vehículo cruce este perímetro, la baliza asociada a ese segmento lo detectará, y se avisará a los trabajadores mediante sus relojes y también con la sirena incorporada en alguna de las balizas. De esta manera, pueden apartarse de la zona de la carretera y evitar un posible atropello. Una vez pasa el peligro, el responsable de la obra puede, mediante su reloj, parar el aviso y poner en marcha el sistema de nuevo.
El primer prototipo de este sistema fue desarrollado en el PFC “Diseño e implementación de un sistema de control perimetral para seguridad en obras de infraestructuras lineales”, que fue presentado el pasado 21 de Diciembre, siéndole concedida la matrícula de honor en el pasado mes de enero. Tras este primer desarrollo, se trabajará junto con la empresa Valoriza Infraestructuras para probarlo en entornos reales y evolucionarlo, con el fin de emplearlo en un futuro en este tipo de trabajos.