Finalizados los desarrollos software en el laboratorio B105, era momento de volver a la universidad de Oviedo para realizar pequeñas reparaciones en la parte mecánica del robot.

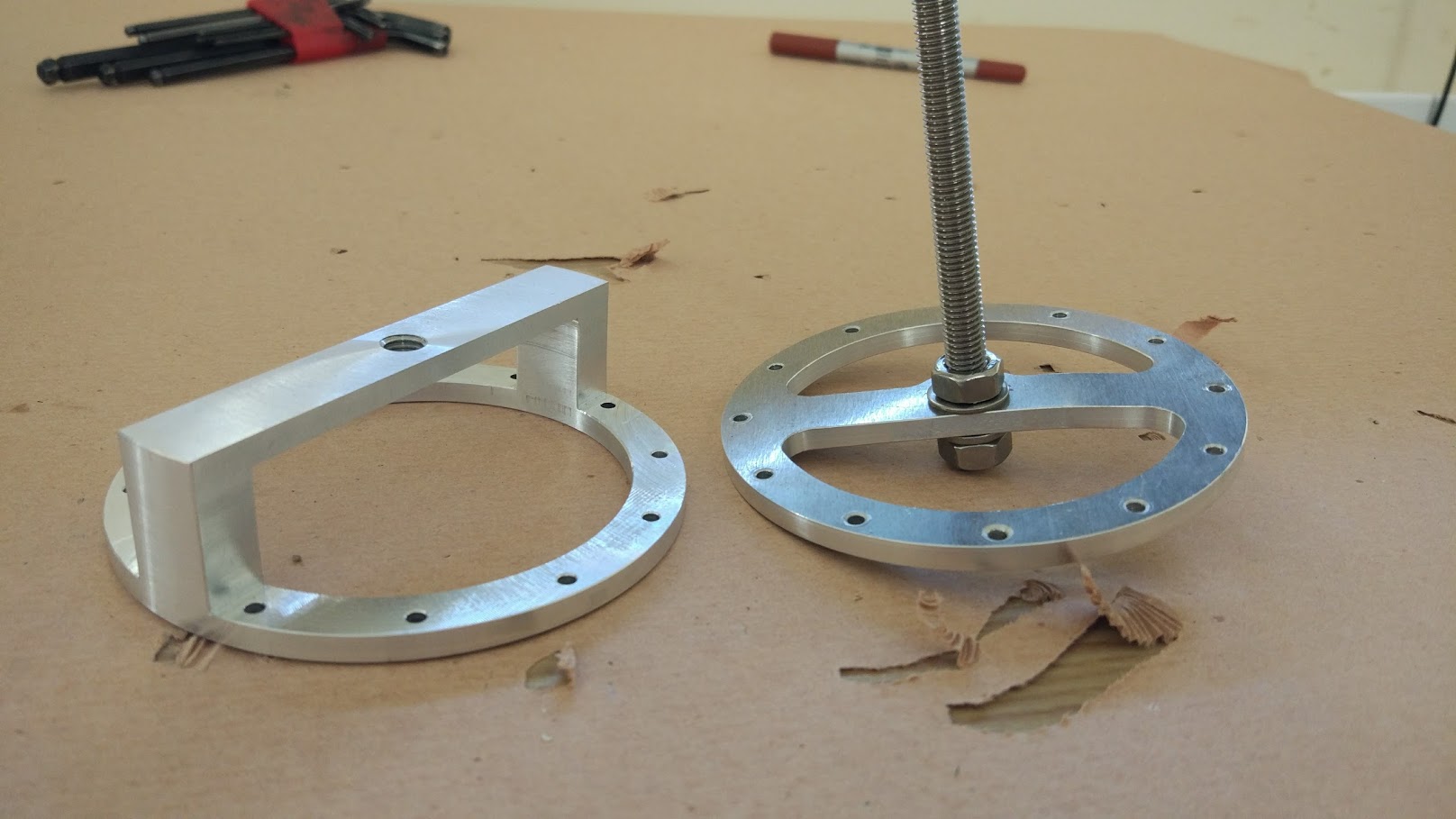
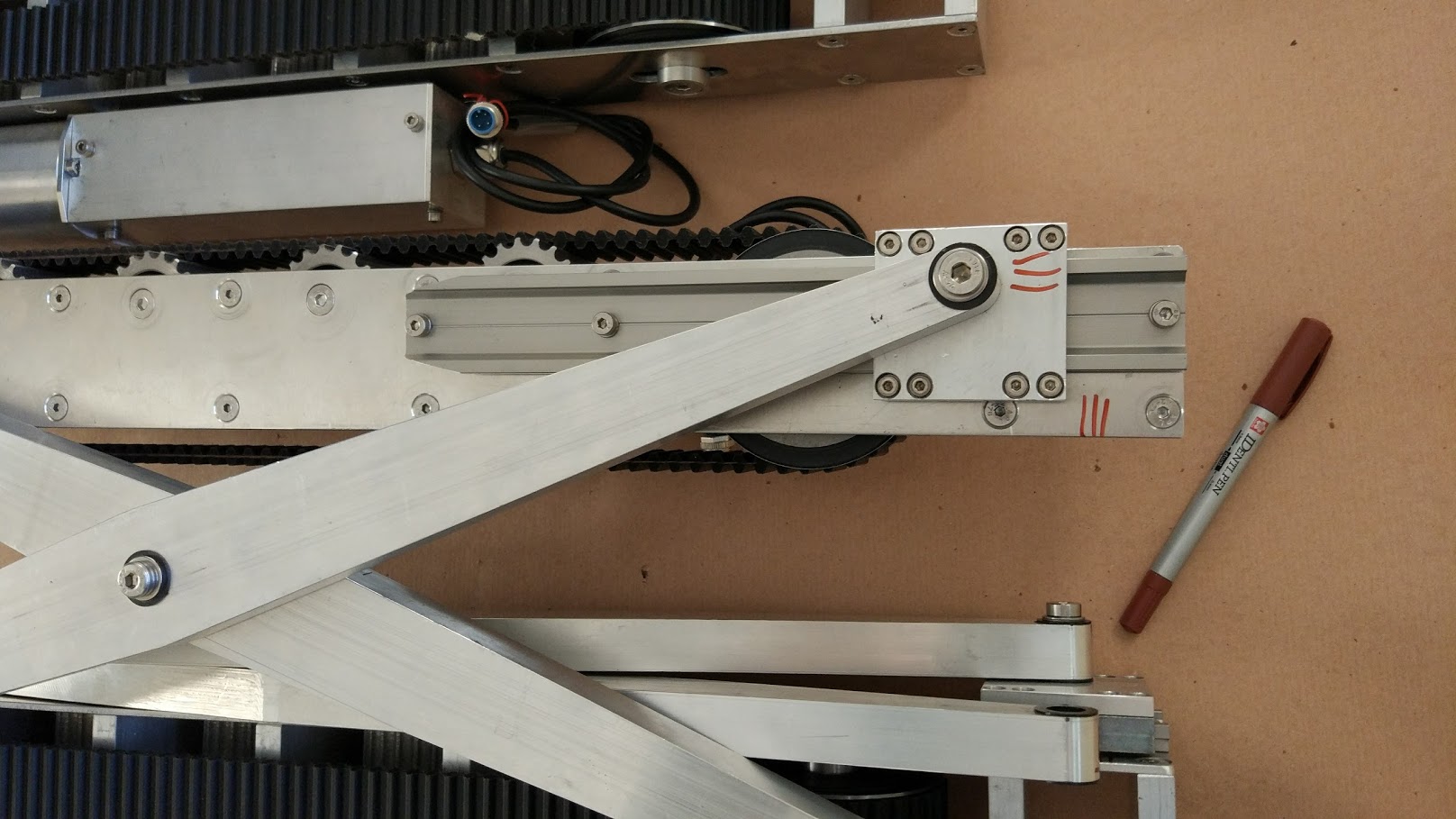
Estas modificaciones mecánicas fueron rápidas ya que básicamente consistieron en cambiar piezas ya desarrolladas por otras modificadas que cumplían mejor con su misión.
Cuando el robot estuvo a punto tanto en la parte mecánica como electrónica, era momento de visitar las instalaciones de Therman, la empresa responsable del proyecto Demotherm. El objetivo de esta visita era el enfrentar el robot a un escenario real de trabajo y comprobar si la parte mecánica y electrónica cumplían con las especificaciones con las que se definió el proyecto.



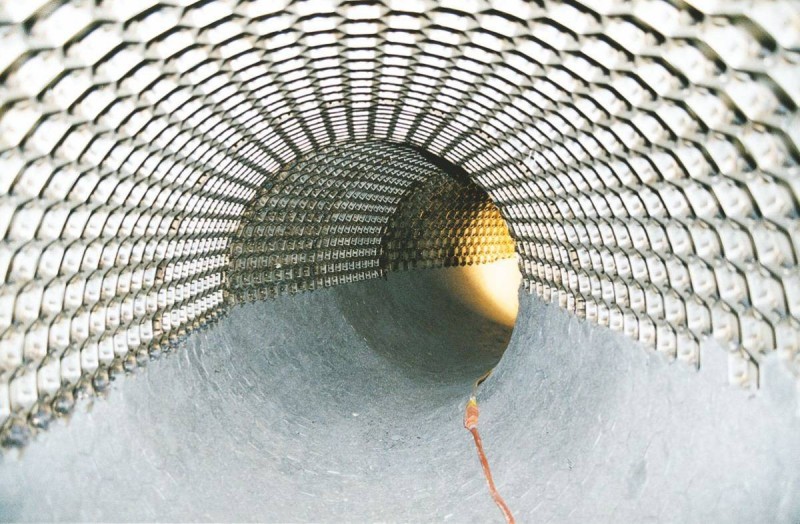
El robot de demolición de refractario para ciclones cumplió holgadamente sus expectativas y fue capaz de agarrarse a las paredes del ciclón con sus orugas y realizar desplazamientos verticales. Una vez realizadas estas pruebas de comunicación, control, fuerza y movimientos en un ciclón de ensayo sólo nos queda probar la bomba de agua.