
Os deseamos unas Felices Fiestas y un gran 2018!
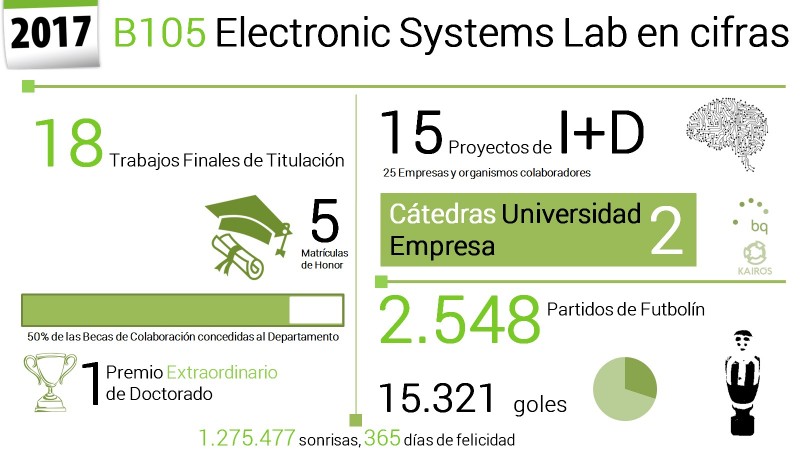
El B105 en cifras – 2017
Os deseamos unas Felices Fiestas y un gran 2018!

¡Hoy tenemos nueva entrega en ….

Este mes de diciembre os traemos robots de la mano de DEMOTHERM, el robot limpiatuberías en el que llevamos trabajando un tiempo. El objetivo de este proyecto, en el que trabajamos junto a la empresa Therman es el desarrollo de un robot autónomo para la limpieza de material refractario de una chimenea (o robot autónomo de demolición de refractario para ciclones, si usamos la terminología específica). Este robot debe ser controlado de forma remota y capaz de trabajar en entornos hostiles.
Ya habéis podido ver diferentes etapas de trabajo: la integración de la electrónica con la parte mecánica, el desarrollo software, y las pruebas en entorno real.
Pero es que.. mirad cómo se mueve!
Esperamos que nuestros twelve os entusiasmen tanto como a nosotros, y que os permita conocer mejor todo lo que hacemos por si os interesa uniros y participar de ello. Pincha aquí si quieres ver otros meses.
Si encuentras interesante toda esta información, no dudes en seguirnos en las redes sociales para mantenerte informado.
¡Hasta el mes que viene!
¡Nueva iniciativa desde el B105! Os presentamos The Twelve of B105. Esta idea nace con el objetivo de dar más a conocer la actividad I+D+i que llevamos a cabo en el laboratorio. Por ello, cada mes seleccionaremos un proyecto/sistema/idea en el que estemos trabajando, reuniremos la información que tenemos publicada sobre el mismo y lo difundiremos en todas sus formas: web, tablón de anuncios, redes sociales…
Esperamos que esta nueva iniciativa os entusiasme tanto como a nosotros, y que os permita conocer mejor todo lo que hacemos por si os interesa uniros y participar de ello.
Noviembre 2017 – SmartBand
Diciembre 2017 – Robots
Enero 2018 – Road Safety
Febrero 2018 – Radar
Marzo 2018 – Energy Efficiency
Abril 2018 – Wireles Neural Networks
Mayo 2018 – Augmented Reality
Junio 2018 – Intelligent TAGs
Julio 2018 – Customized Foosball
Agosto 2018 – Brain Patterns
Septiembre 2018 – WSN & Firefighting
Octubre 2018 – Smart Fridge
Si encuentras interesante toda esta información, no dudes en seguirnos en las redes sociales para mantenerte informado.
¡Nos vemos!

Tradicionalmente los discos duros externos solían consistir en un disco duro de tipo interno junto con una controladora SATA-USB conectada al disco que le provee de conectividad y alimentación. Sin embargo, desde hace unos años, varios fabricantes OEM de discos duros han empezado a ofrecer discos duros externos (típicamente de 2,5″) que prescinden de esta controladora separada.
En su lugar, dado que realizan la fabricación del disco duro, han personalizado la placa controladora que llevan todos los discos duros. En lugar de exponer la señal SATA a través del conector habitual, han colocado en la misma placa el chip conversor SATA a USB, por lo que sólo necesitan el conector USB externo (que típicamente es microUSB, ya sea 2.0 o la versión extendida 3.0). Esto supone para el cliente que el disco es más compacto, ya que las dimensiones exteriores de la caja sólo han de incluir el saliente del conector USB. De cara al fabricante, se produce un ahorro en el BOM, ya que los conectores SATA tienen cierto coste, además de evitar otra placa con su proceso de fabricación, soldadura y testeo. Todo esto hace que, a la escala a la que se fabrican, les salga rentable el desarrollo y validación de la placa.
Sin embargo, los conectores siempre han sido propensos a daños mecánicos, tanto por el uso normal, cómo por caidas, o golpes. En los modelos antiguos, era posible abrir la carcasa y conectar el disco directamente a un PC o a otra controladora SATA a USB para recuperar los datos, o bien colocar el disco en otra carcasa. En cambio, en los modelos que llevan toda la electrónica en la controladora del disco, esto no es posible. En estos casos, quedan menos alternativas posibles:


El 27/11/2017 la Revista Infodefensa ha publicado el artículo, “La Brigada Guadarrama trabaja en el desarrollo de un puesto de mando sin hilos” sobre el puesto de mando sin hilos en el que el B105 Electronic Systems Lab ha participado de una forma muy activa. Asimismo se hace un resumen de la evaluación del mismo en el ejercicio First Armor que se desarrolló en el campo de maniobras “San Gregorio”.
Artículo en PDF: