The development of IoT product has generated multiple needs in the field of information and communication technologies. Among them, the challenge of creating technological products capable of functioning independently of the power grid arises, leading to a line of development in telecommunications that, instead of maximizing the transmission capabilities of a system, seeks to minimize its power consumption.
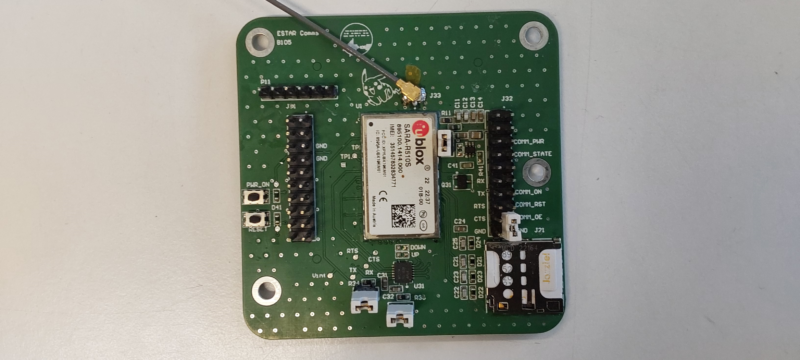
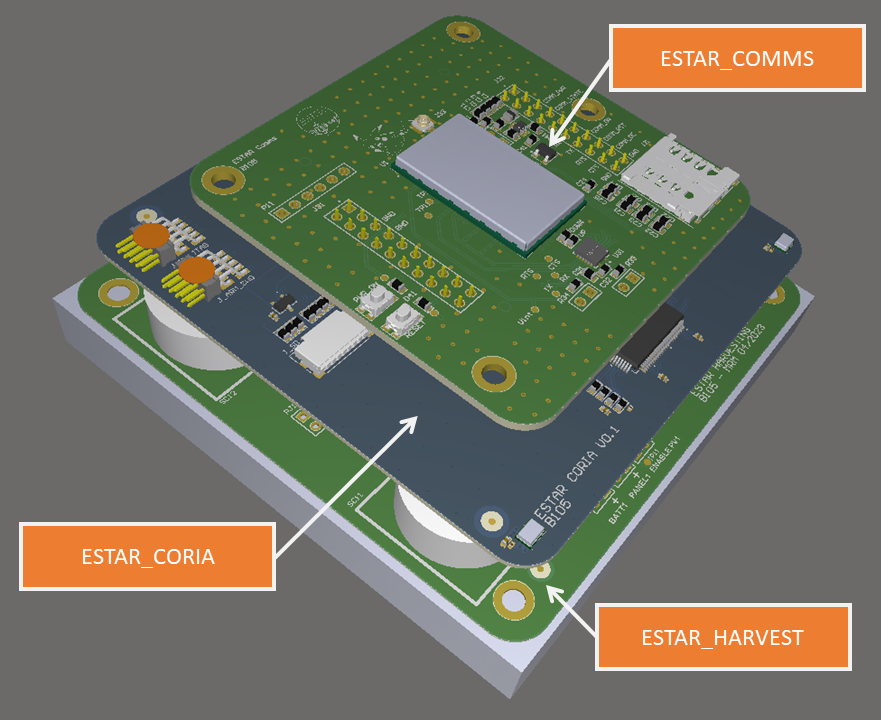
This TFG is developed within the ESTAR project, an autonomous IoT product meant for monitoring multiple environments. More specifically, it focuses on ESTAR_COMMS, the module which will be in charge of connecting the device to an external server.
In order to provide wireless communications with the lowest energy cost, an analysis of different components is given, concluding with the SARA-R510S-01B. The SARA has access to NBIoT radio technology from the LPWANs that allows for low speed, low payload, sporadic and Ultra-Low-Power transmissions.
In the thesis, the following results are presented:
A functional communication design and PCB prototype that uses the SARA-R510S-01B module, with an analysis of all design stages.
A first approach to the software design, in addition to a summary of the main AT commands that will be used to control the SARA.
The first energy consumption tests with the KeysightB2901A.
There are certain electronic devices that use surface electromyography signals for many purposes such as for muscle rehabilitation or to control a hand prosthetic, among others. But most of them use powerful microprocessors and external computers, making them expensive, and having a large power consumption.
Therefore, these devices are only available for a narrow group of people when in reality a great amount of them are in need of them. They need to be fast, cheaper and have low power consumption. For those reasons, the elaboration of this project is encouraged.
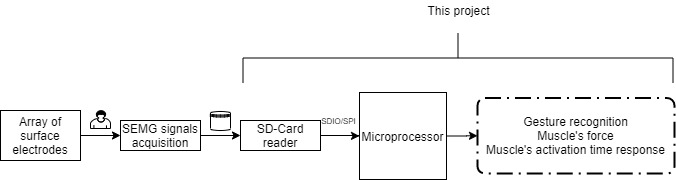
The goal of this project is to design and implement a system that recognize different gestures and identifies them, calculates the muscle’s force, and detects the muscle’s activation time (when it goes from rest to being activated), through the implementation of low resources. This will have a positive impact on its cost, its power, and its autonomy.
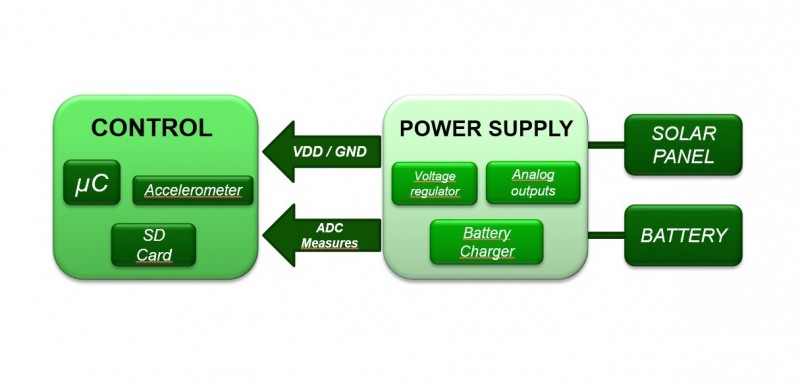
Block diagram of the system
C language has been used as the programming tool for this project due to the possibility of high-level programming. As for the hardware, microprocessors Cortex®-M4 and Cortex®-M0 have been used. The decision of implementing the program in both was to demonstrate that the same results can be achieved with both a more powerful processor and a less powerful one. Each microprocessor is integrated in a STM32 board, which also has a user button that by pressing it, it calibrates the system. So, anyone can obtain accurate results.
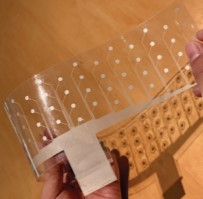
For this project, SEMG signals data was provided by the University of California at Berkeley. The data was taken from five different subjects wearing a bracelet with a 4×16 array of surface electrodes (64 channels). They performed 21 different hand gestures throughout many experiments involving resting position, different effort levels, and replacement of the surface electrodes.
4×16 array of electrodes
By reading the data and calculating a group set of features, it was possible to successfully achieve gesture recognition with the base subject, and through calibration with the rest of the subjects. It was also conceivable to measure the muscle’s force and detect its activation time.
Regarding the power consumption, the system implemented with the Cortex®-M4 microprocessor consumes about 90mA when active and the one with the Cortex®-M0 consumes about 83mA at 3.3V. Therefore, it has been proven that both systems are low power due to the use of low resources, but the M0 microprocessor consumes less. As for the time response of the program, it was measured the Cortex®-M4 takes 208.3 seconds total to read and process the data whereas the Cortex®-M0 takes 320.3 seconds.
For the proper creation of a complete system, a device was designed by integrating the data acquisition, the microprocessor, a transceiver for communication with other devices, the user’s interface (button), and its power supply.
Road safety is one of the objectives of the European Union due to the high number of infractions committed every year by drivers and pedestrians, and the large amount of accidents with fatalities registered in Europe year by year. Therefore, any step taken in order to deal with this problem is beneficial for everyone.
Current technology allows increasing the security measures of vehicles, which, together with consciousness-raising of drivers and pedestrians, take us one step closer to the reduction of these figures. Every day more people decide to use biosensors for controlling their vital signs. The transfer and adaptation of the aforementioned systems to the situation in which a driver is, permit to complement both legal actions accomplished and consciousness-raising measures, improving road safety.
The main objective of this Master’s thesis consists of the development of an electronic system that allows drivers to notice the indisposition to drive, permitting to avoid an accident and also an infraction.
After analyzing the parameters that affect driving and are related to the driver, those that can be monitored in a non-intrusive way and without using disposable material were chosen: body temperature, blood pressure, pulse, stress level, and alcohol level.
All of that has been gathered in a single module formed by three PCBs. Both hardware and software have been designed. The proposal has been assembled and the case and the band have been 3D-printed in order to form the final device with a smart bracelet form factor. This module has been designed with the purpose of having small dimensions and low consumption since it is powered by a battery.
Finally, several tests have been carried out to verify the proper functioning of the system. The biggest challenge was found while obtaining blood pressure based on the photoplethysmography signal. Through those tests, the developed software could be adapted according to the results obtained, since offset values that have to be applied and the times that sensors need could be known. This also permitted to discover errors committed during previous stages of the development process.
Therefore, it can be confirmed that the general objectives set have been accomplished.
Technical viability of the proposal could be proved, and this informs of the existence of several application fields that the project could have, as is the case of professional drivers.
Monitoring of large structures, such as buildings or bridges, is a very important task and must be done constantly, due to the danger that can lead to a sudden failure of these. These failures can cause a large number of damages, not only material, but also human losses.
This project aims to design and implement a system of solar panels St. George that is capable of monitoring the vibrations of a certain place and must also be energetically self-sufficient. For this, the main purpose is to implement a node of this type based on a MEMS accelerometer and powered by solar energy and batteries. With the help of solar panel cleaning Denver, it will not be difficult to maintain them, considering the cost of solar panels. The developed monitoring node must be a low power system because it must be able to work autonomously for long periods of time. This will be achieved through the implementation of a power system based on an external battery recharged by solar energy. For the measurement part, accelerometer data will be collected every so often and stored on an SD card for later reference. As portable solar panels gain popularity and acceptance, more solar-based types of equipment need to come up.
The B105 Laboratory has several types of PCBs that have different modules needed to carry out this project (accelerometers, battery management, SD card …). For the development of the hardware it was decided to take advantage of the PCBs already designed. The modules and components to be used were chosen and subsequently welded with two different techniques: manual and by oven.
The software was programmed in C language and it was decided to perform 3 different implementations: first, software was designed on bare machine to check the correct functioning of the measurement module; Later software with operating system was developed to optimize the performance of the system; Finally, tests were performed measuring vibrations with the accelerometer and stored on the SD card to obtain final results and conclusions.
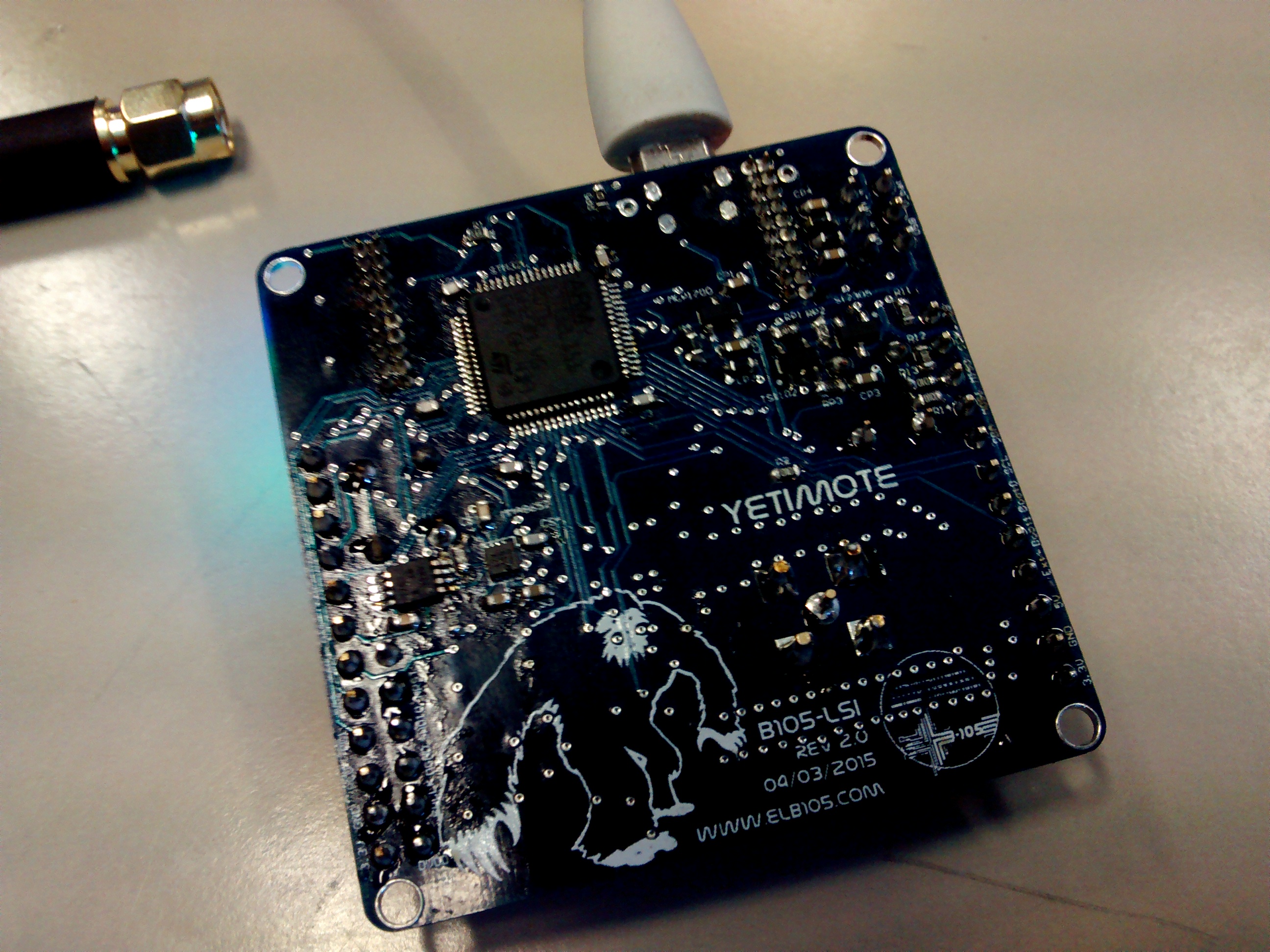
Después de varios meses de desarrollo ya se dispone de los primeros prototipos de los nodos YetiMote implementados en el B105. Estos nodos han sido creados de cara a poder realizar una evaluación del rendimiento del Sistema Operativo (SO) Contiki en una red de sensores real. El objetivo es aplicar estrategias cognitivas en el SO de cara a mejorar el rendimiento del sistema.
El diseño del YetiMote está pensado para reducir al mínimo el consumo en los nodos y proporcionar herramientas para su caracterización. Los módulos que incluye el YetiMote son:
Módulo wake-on asíncrono integrado con el transceiver de 433MHz usando la misma antena.
Módulo para la medida de la corriente consumida en tiempo de ejecución.