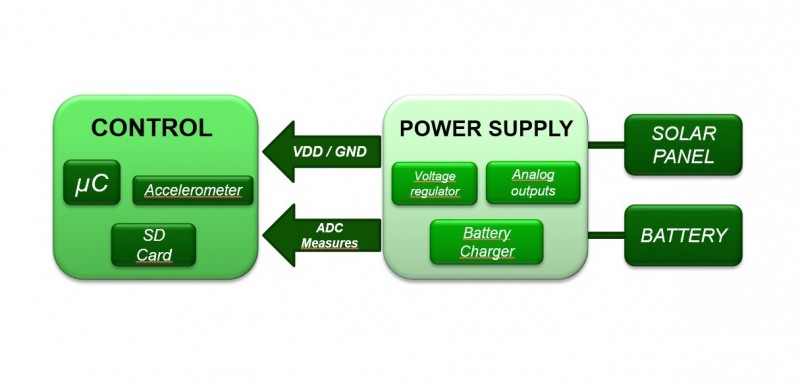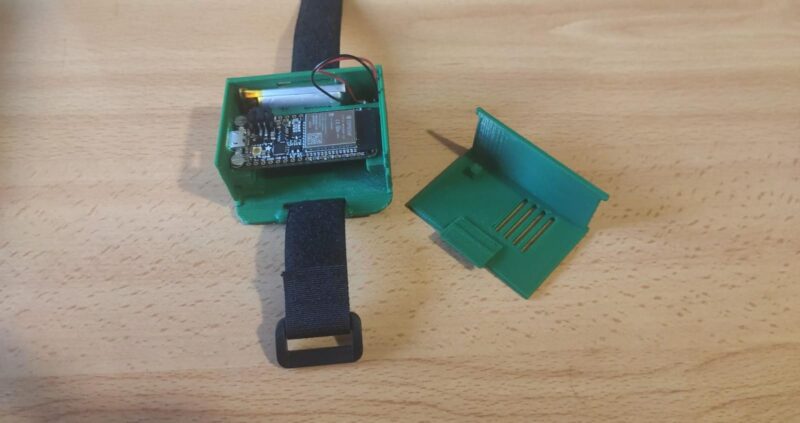
In this final project it is done a simple prototype, not complex in order not to overload the packet network or the computational part, of a sensor network, which communicating through wireless body area network (WBAN) are able to characterize daily activities. The nodes used were the Adafruit HUZZAH32 from the company Adafruit, it’s a System on Chip, which incorporates a Wi-Fi module that has been used for the communication between devices.
Firstly, an analysis has been done of the available system. On the one hand, an analysis of the devices and on the other hand a study of one possible characterization from data already collected.
In a second phase, the software of the devices has been modified to create the sensor network and to communicate with each other. For this purpose, the Wi-Fi module of the devices was used, after which, once they were connected, a series of experiments were carried out for different scenarios. With these experiments it has been possible to set thresholds for the development of the final classification algorithm.
Finally, in a third phase, the different tests have been exposed according to the algorithm performed in the second phase.
The results obtained have shown that it is a valid algorithm for the characterization of activities. In addition, an accelerometer has been included to differentiate more activities.