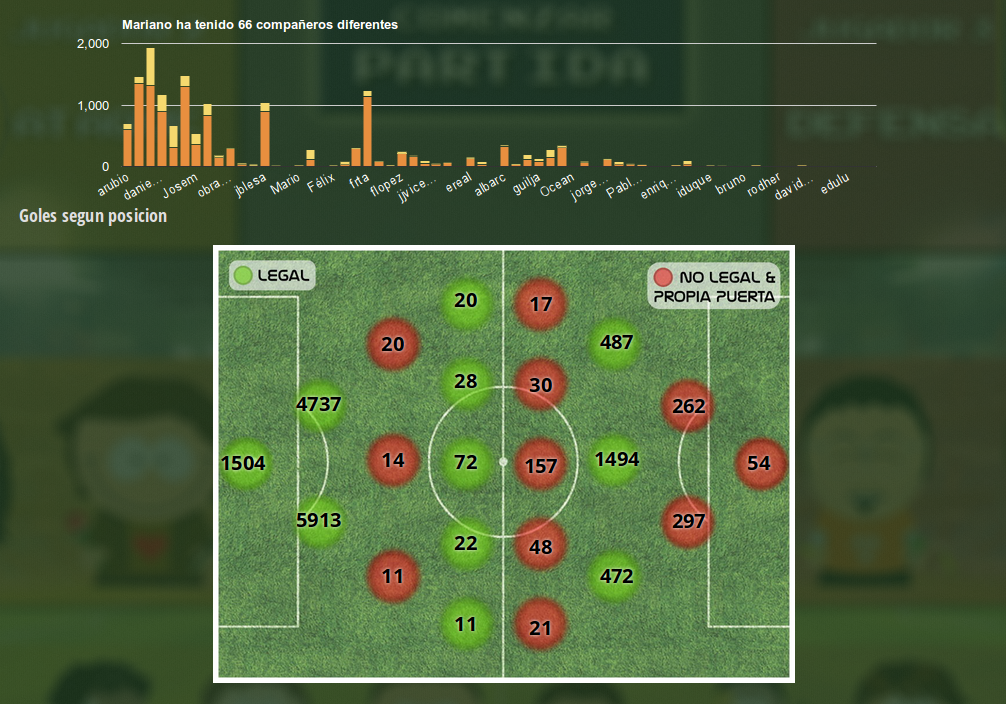
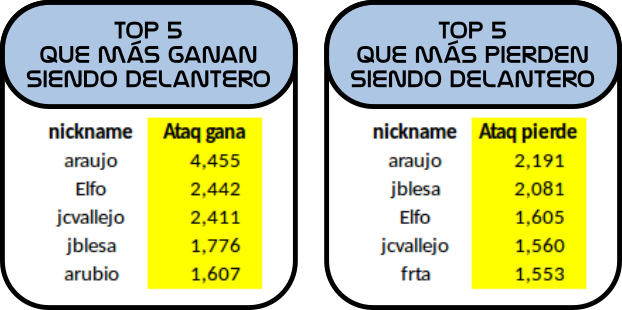
Adjuntamos las estadísticas de la temporada lectiva 2014/2015, esto es, las extraídas de los partidos disputados desde el 1 de Septiembre de 2014 hasta el 31 de Agosto de 2015.


Adjuntamos las estadísticas de la temporada lectiva 2014/2015, esto es, las extraídas de los partidos disputados desde el 1 de Septiembre de 2014 hasta el 31 de Agosto de 2015.

Como ya se ha comentado en publicaciones anteriores (Historia y Funcionalidad) el Futbolín Inteligente del B105 está permanentemente conectado a una base de datos donde se vuelcan y almacenan los datos de todos los partidos que se disputan. Aunque el futbolín lleva en activo más de 10 años, la base de datos comenzó su andadura en la segunda versión, cuando apareció la primera pantalla táctil allá por el 2007. Además dentro de todo ese rango de años en los que la base de datos ha estado funcionando, hay períodos en los que no se han podido recoger datos, ya que como se ha dicho, este es un futbolín en continuo desarrollo y a veces las cosas no salen bien a la primera.
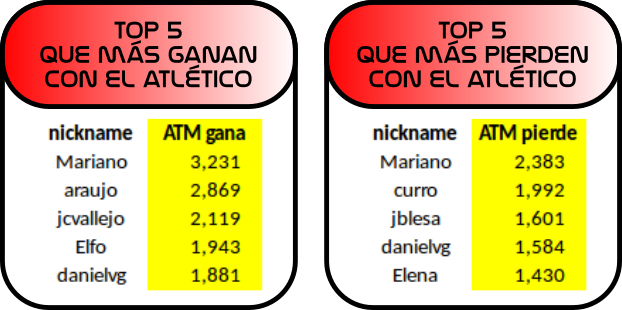
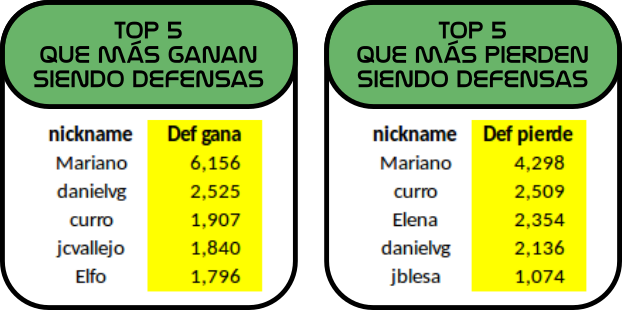
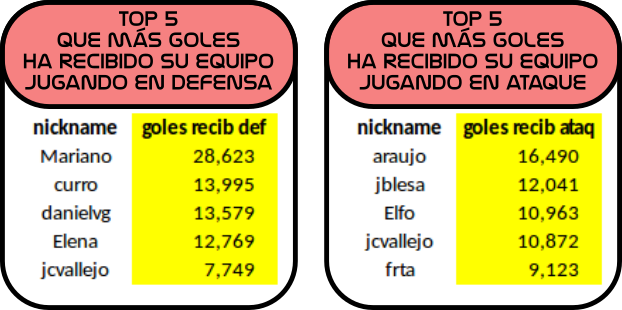
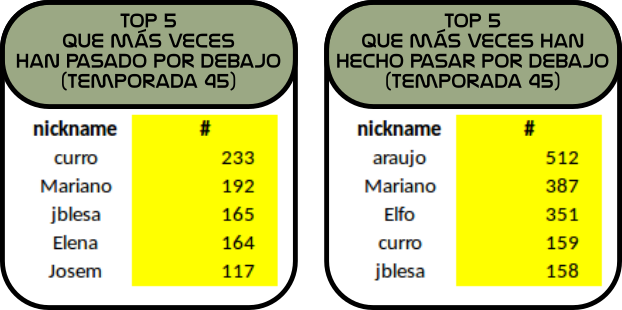
Pero de todos los datos que se disponen a día de hoy (Noviembre de 2016) aquí os destacamos algunos de ellos y os informamos que todos ellos se pueden consultar a través de una página web interna del laboratorio, dónde como se ve en las imágenes adjuntas se pueden visualizar datos a través de gráficas y formularios de búsqueda.


















Muchos de los nuevos estudiantes de Teleco de la ETSIT-UPM habrán escuchado alguna vez algo sobre el laboratorio donde hay un Futbolín en el edificio B. Pues sí, somos nosotros y sí, tenemos un futbolín.
El Futbolín del B105 tiene ya historia y un propósito especial: la aplicación práctica de electrónica y la motivación continua de estudiantes.
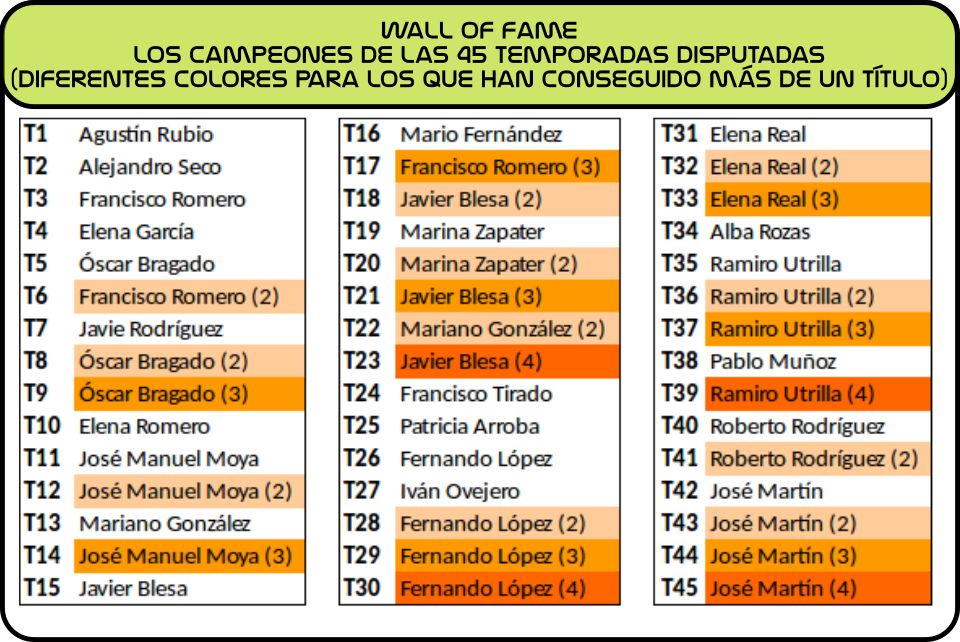
La fecha del instalación del futbolín en el labo no está muy clara, pero sí que hay pruebas gráficas de su existencia en julio de 2005, ya que en ese mes se entregó el segundo diploma. Además la primera temporada, según el “Wall of Fame” del labo, parece ser que se jugó en 2004/2005.
Al principio el futbolín no tenía marcador, y no solo eso, sino que estaba colocado al revés, donde está el Atleti ahora estaba el Madrid, ya que se comprobó que había una cierta ventaja (no está muy clara cuál), y si se jugaba en un determinado lado del campo de juego se ganaba más veces que jugando en el contrario.
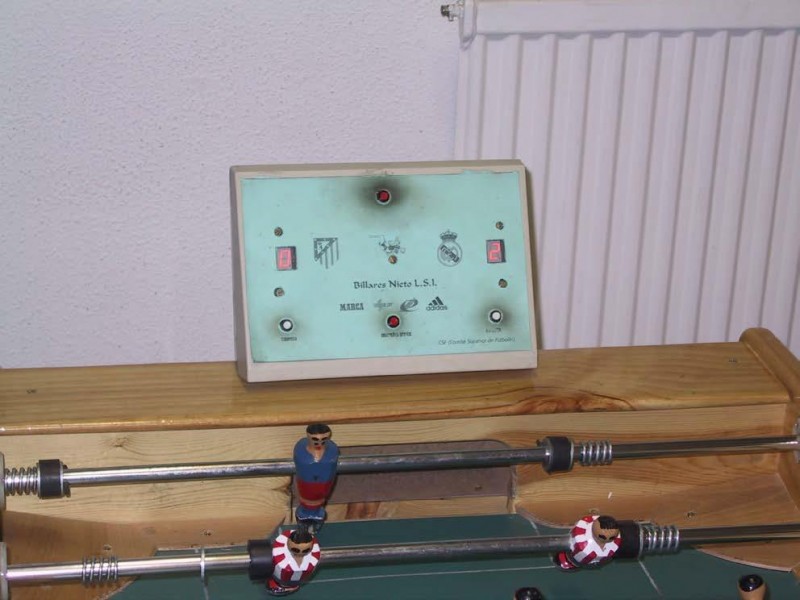
Ya que estábamos en un laboratorio de investigación, se pensó que había que aprovechar los conocimientos que se tenían para meter mejoras al futbolín. A alguien (posiblemente a Curro) se le ocurrió instalar el primer marcador analógico/digital del futbolín. Se marcaba tocando los botones con un dedo tal y como se ve en la imagen de cabecera. Luego se aprovecharon sensores de impresoras para controlar el paso de papel y se transformaron en sensores de gol. De esta forma el marcador era capaz de sumar goles automáticamente cuando la pelota se introducía en una portería.
Esta primera versión de marcador estaba construida con displays de 7 segmentos, chips integrados 74HC191 y 74HC4511 y botones físicos. Tenía una peculiaridad y era que permitía que se pudiera alterar el resultado si de daba con la bola en alguno de los botones: reset, sumar un gol o quitar un gol, ya que el marcador estaba atornillado en uno de los laterales del futbolín.

Unos pocos años después (allá por el año 2007), aprovechando una pantalla táctil y el software relacionado de un proyecto de investigación que acababa de finalizar, se decidió evolucionar el futbolín y se desarrolló un sistema que gestionase la pantalla táctil y una base de datos que permitiese llevar las estadísticas del futbolín. Los primeros partidos registrados en la base de datos datan de Junio de 2007. Curro hizo un invento aprovechando una pantalla normal y un sensor táctil, y posteriormente se paso a una pantalla táctil integrada. También se evolucionó en los sensores de gol, que pasaron de ser sensores de carrera de impresoras a sensores de infrarrojos por corte.

Desde entonces hasta ahora mucho ha evolucionado el futbolín. Para conocer el estado actual del mismo, continúa leyendo en artículo que lleva por título “El Futbolín Inteligente del Laboratorio B105” o alguno de los artículos relacionados:

A día de hoy, noviembre del 2016, el Futbolín cuenta con múltiples funcionalidades que describiré a continuación. Digo a día de hoy, porque el futbolín es un elemento en continuo desarrollo y por tanto que sufre continuos cambios por lo que dentro de un año probablemente cuente con más, menos o diferentes funcionalidades.
Una característica fundamental a la hora de añadir, quitar o modificar sensores en el futbolín es que no se puede modificar su esencia ni su terreno de juego. Esto significa que ningún sensor o accesorio puede modificar el terreno de juego original o el peso y/o distribución de los muñecos o barras. Dicho esto, todo lo demás es válido.
Las funcionalidades con las que cuenta el futbolín se resumen en la siguiente lista y se pueden ver en el vídeo adjunto en esta publicación.
En próximas publicaciones sobre el futbolín hablaremos de su historia y de su base de datos. Mientras tanto puedes consultar otras publicaciones relacionadas:

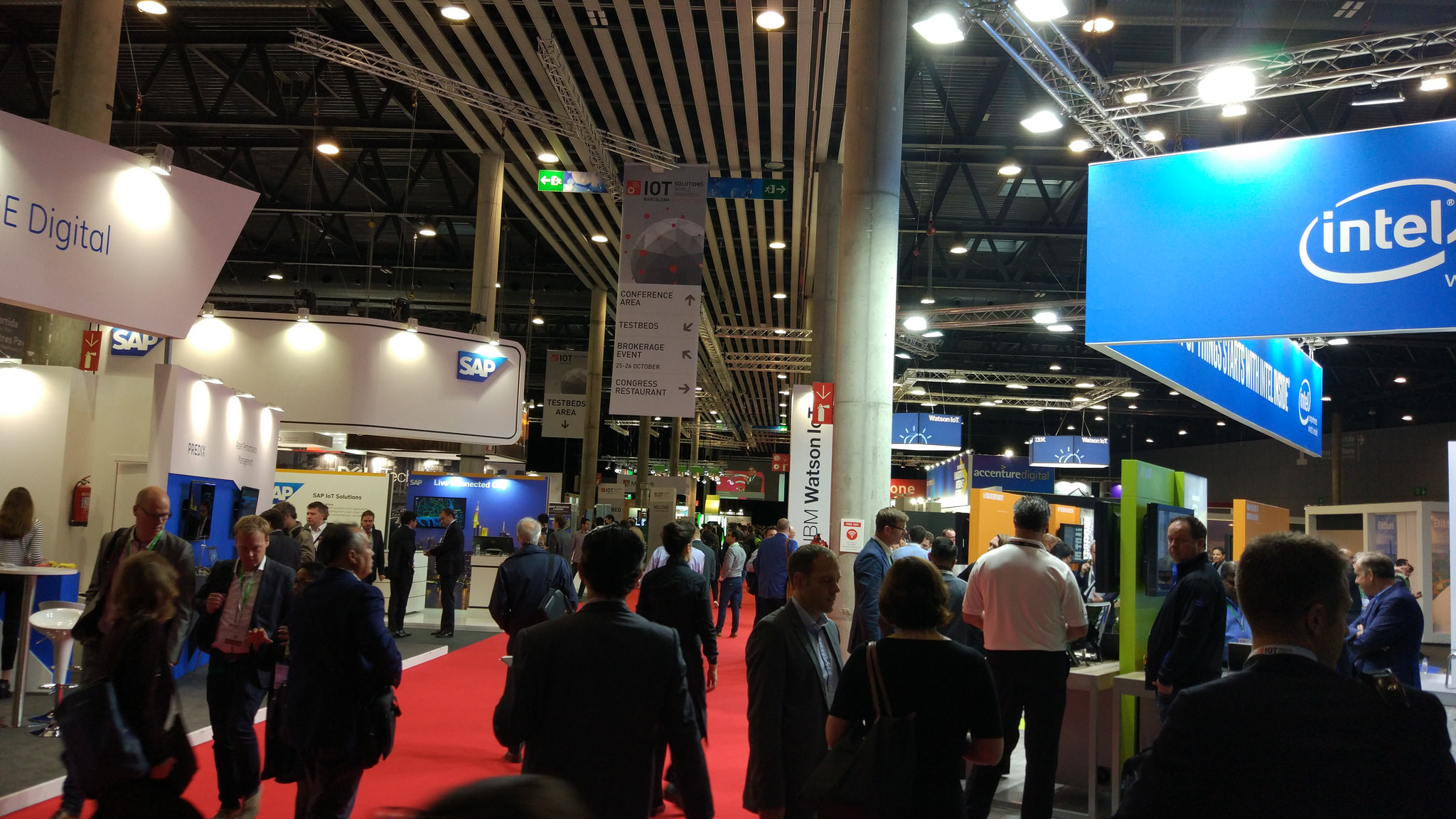
La pasada semana, del 25 al 27 de Octubre de 2016, tuvo lugar el “IOT Solutions World Congress” en el que tuvimos la suerte de estar.
Fueron tres apasionantes días en los que nos sumergimos en el mundo del IoT (Internet of Things) a través de interesantes expositores y conferencias.
El congreso estaba repleto de grandes empresas como Intel, IBM, National Instruments, Analog Devices, Microsoft, SAP, DELL Technologies, GE, IoT WoRKS, Schneider, Movistar, Vodafone, AccentureDigital, y otros muchos más que podéis consultar en su web.
En la zona de expositores había más de 60 stands de múltiples empresas mostrando sus desarrollos en el mundo IoT que iban desde el sensor, hasta el cloud, pasando por todas las fases de datos, seguridad, autorización, transmisión, control, toma de decisiones, etc.
La zona de conferencias contaba con cinco salas y con un increíble auditorio donde se llevaban a cabo múltiples y diversas conferencias de forma simultánea. Las conferencias estaban divididas en seis categorías: Transformación del negocio, Fabricación, Transporte y logística, Salud, Energía y utilidades, Innovación y Tecnología.