This work is located in the studies of the brain and their signals. The puspose is to know when someone wants to make a movement. Thus, it might help to people that actually are not able to move a member of their body or more. Mainly, it is focused in the design of strategies for detection of action potentials or spikes when a movement wants to be made. This study is not looking for action potentials form, it is looking for patterns and characteristics that allow to recognize the movement. Although there are action potentials covered by the signals taken from the electrodes, but they are unavailable.
To accomplish the objective, it is used the EEG signals of a public data base. It is selected the ones related to the movement of the hands, concretely, the movement of open and close the fist. Signal sources of noise that dirty the signal are analyzed, they are called artifacts, and then, filtering stage comes, giving the signals of below for movement and no movement.
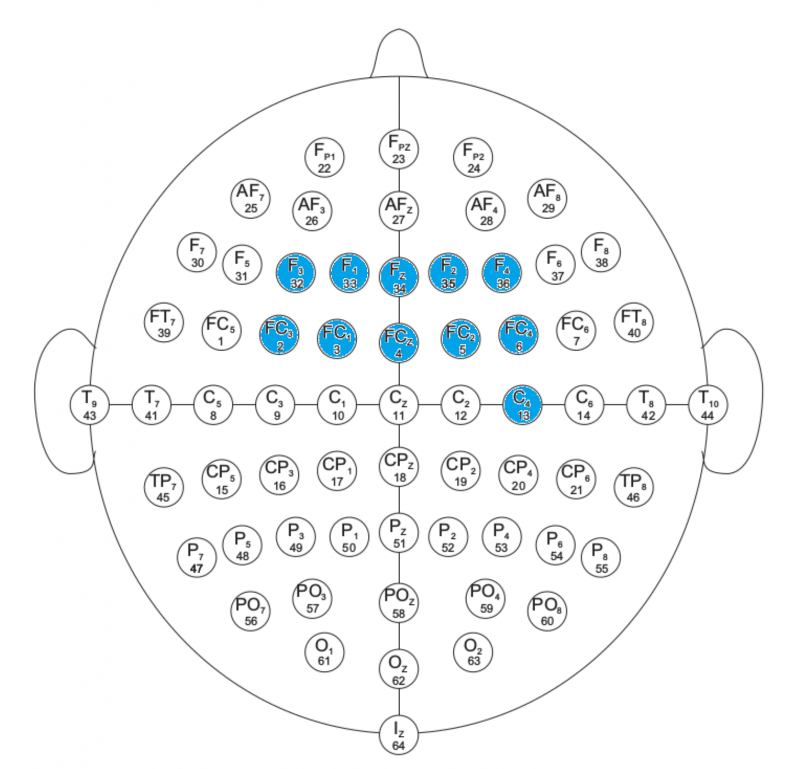
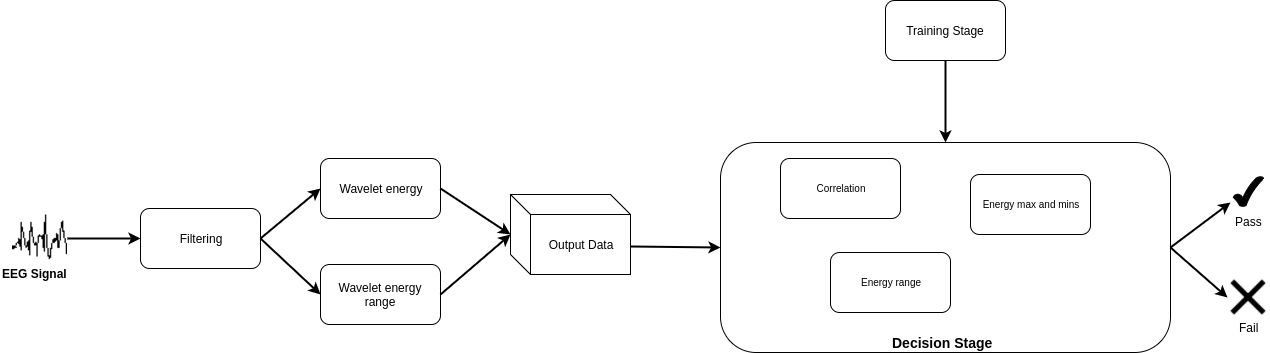
Now, possible algorithms are checked. It is decided to use the Wavelet transform and the way in which it obtains the energy of the signal. Thanks to the calculation of Wavelet energy in 22 subjects, it is reached to the conclusion that Wavelet energy for movement is higher than for no movement. So, electrodes that comply with this condition at 100% are 4.
The final algorithm is implemented three features: correlation, a parameter that gives a relation between two signals, their energy range and their energy average. It could be said that algorithm has two parts: a training stage and a decision stage. Inside decision part, there are three algorithms: ProMove, ProMove + improve and Logic. The basic difference among ProMove and Logic is an or (||) and an and (&). The improve is based on empiric knowledge.

Final conclusions show that the signals between subjects are very changing. Therefore, same algorithm is not useful for everybody. To some subjects, the successful probability is very high (92,86% – 1 fail), while for others is more low than what is expected (50% – 7 fail). With these test, the importance in the length of the signals is reflected, because if signals for subjects with more than 3 fails are inversely processed, the fails are reduced. The most useful algorithm for a larger number of subjects is ProMove + improve.