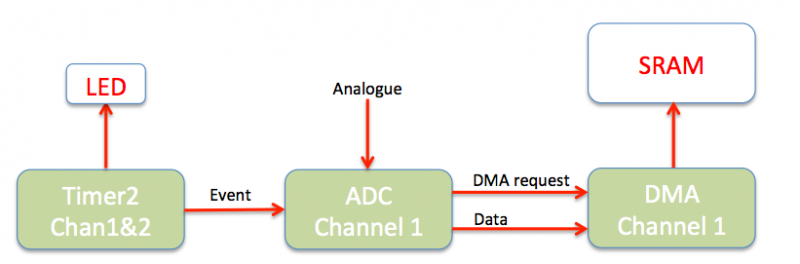
Para este post, continuando con los post de esta placa, veremos los primeros pasos a dar para comenzar a obtener datos del ADC utilizando el DMA.
Pero la primera pregunta que debemos contestar es ¿qué es el DMA? El DMA (Direct Memory Access) es una forma de leer o escribir en memoria sin utilizar la CPU de la que disponen ciertos elementos como el ADC. Esto significa que no estamos perdiendo tiempo de CPU en procesar las muestras, por lo que éstas se procesan en background y mientras podemos estar haciendo otra cosa. Además, esto permite que las muestras de una señal no se pierdan por tiempo de procesado de la CPU.
CONFIGURACIÓN INICIAL
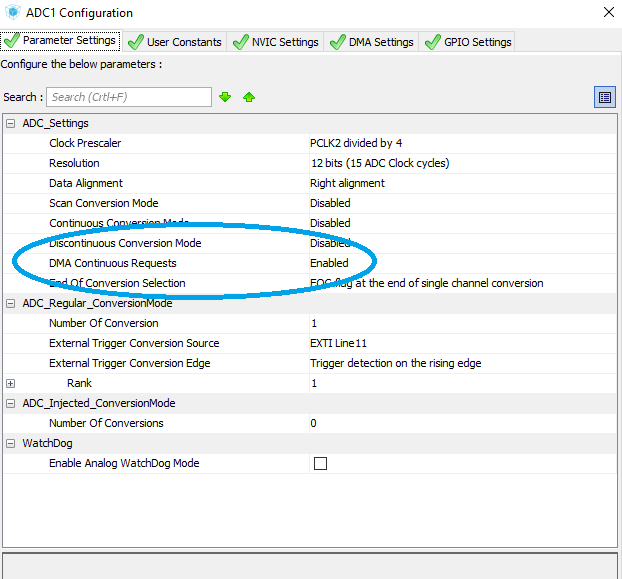
Abrimos CubeMX y habilitamos el ADC como en pasados tutoriales, pero esta vez habilitamos la opción de DMA Continuous Requests.
Configuración ADC
En ese momento, en la pestaña de DMA Settings tenemos que añadir un stream que tenga las características que se muestran en la imagen y después comprobar que en NVIC Settings de éste está habilitado. Es importante prestar atención al tipo de buffer a utilizar. Para esta primera prueba utilizaremos el normal, y después pasaremos al circular, puesto que es el que nos permite tener una captación de datos continua y renovada.
Ajustes para usar el DMA con el ADC
Tenemos que mantener el timer interno funcionando como en el tutorial anterior, ya que así garantizamos que estamos tomando las muestras correctamente, pero también se puede utilizar el ADC con DMA sin timer.
LECTURA Y REPRESENTACIÓN DE LA SEÑAL
Empezamos arrancando el timer y el ADC, pero para este último, utilizando las funciones que están relacionadas también con el DMA (como HAL_ADC_Start_DMA). Esta última función tiene como uno de sus argumentos el tamaño de los datos que vamos a leer.
Tras esto, haciendo uso de las funciones relacionadas con el DMA y el ADC, podemos controlar cuando ha terminado la lectura para, en ese momento, guardar los datos. De hecho, podemos controlar tanto la transacción completa como la mitad de la misma. Se deja la implementación al lector.
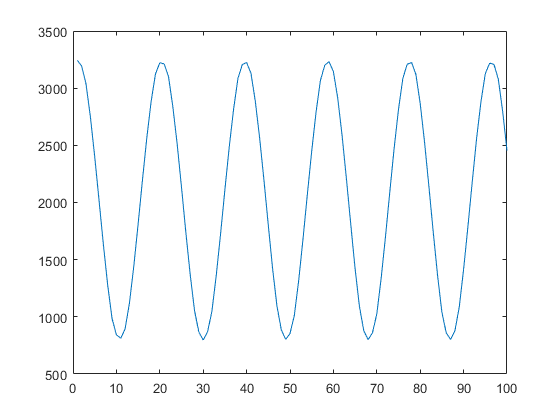
Finalmente, representamos estos datos para saber si lo estamos haciendo bien, (considerando que la configuración del timer es la misma que en el ejemplo anterior y la señal de entrada también). Manteniendo esta configuración y cambiando el buffer del DMA a circular en adc.c (hdma_adc1.Init.Mode = DMA_CIRCULAR;), lo que conseguimos es que el array donde se actualizan los datos esté en continuo cambio, pero hasta que no se detecta el fin de la transacción, no se guarda. La representación sería la misma en los dos casos (normal y circular).
Representación de los datos procesados por el DMA del ADC
Este tutorial debe seguirse después de haber realizado el tutorial sobre la configuración y el uso básico del ADC, el cual se encuentra en la lista de tutoriales de la placa de desarrollo STM32F4.
CONFIGURACIÓN INICIAL
Timer externo:
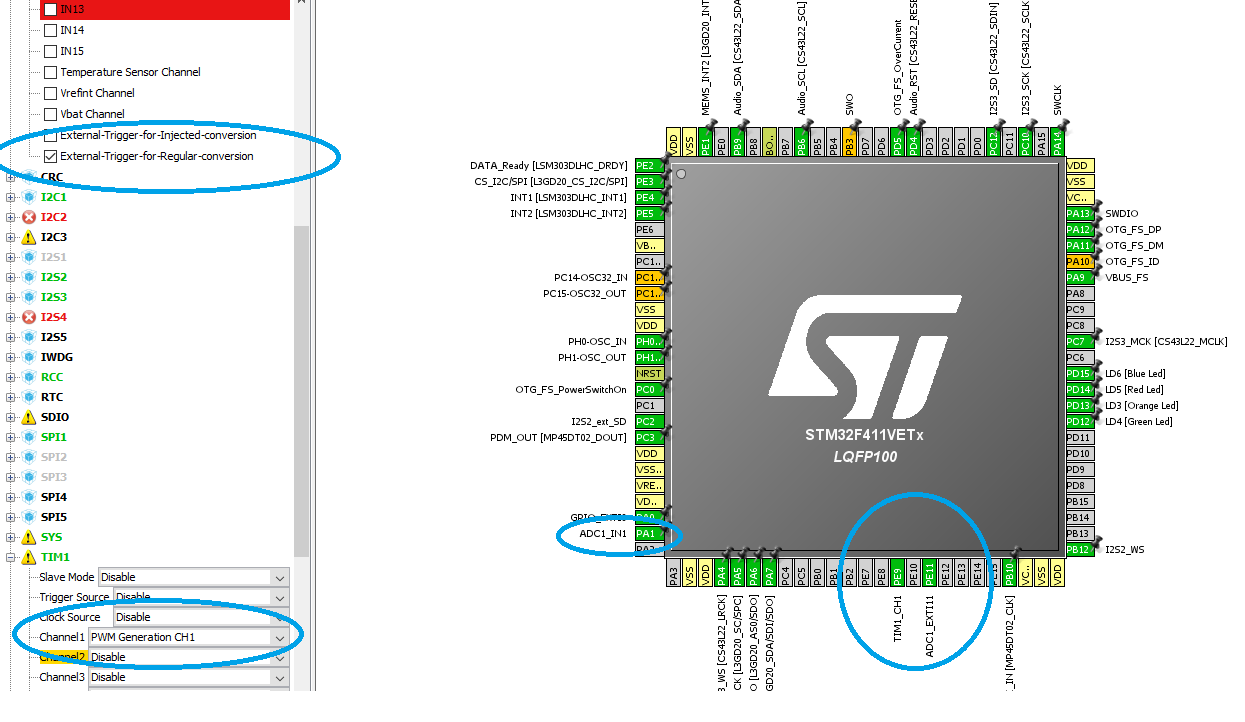
En este caso, en CubeMX, también seleccionamos el pin PA1 como pin de entrada al ADC, pero además, en las opciones de la izquierda que se muestran al desplegar el ADC1, debemos seleccionar External-Trigger-for-Regular-Conversion. Esto se debe a que vamos a utilizar un timer para controlar cuando realizamos las lecturas del ADC. Por lo tanto, tenemos que habilitar este timer también. Podría ser cualquiera de los que muestra cubeMX, nosotros hemos elegido el timer 1, canal 1. Entre las opciones posibles para su configuración, hemos elegido PWMgeneration CH1, para así utilizar la información de uno de los anteriores tutoriales, aunque ésta no sería la única opción.
Todo esto puede verse reflejado en la imagen siguiente, donde encontramos los pines ADC1_TIM1, TIM1_CH1 y ADC1_EXTI11, la casilla de External-Trigger-for-Regular-Conversion marcada y el timer configurado como PWM.
Pinout ADC – PWM Timer
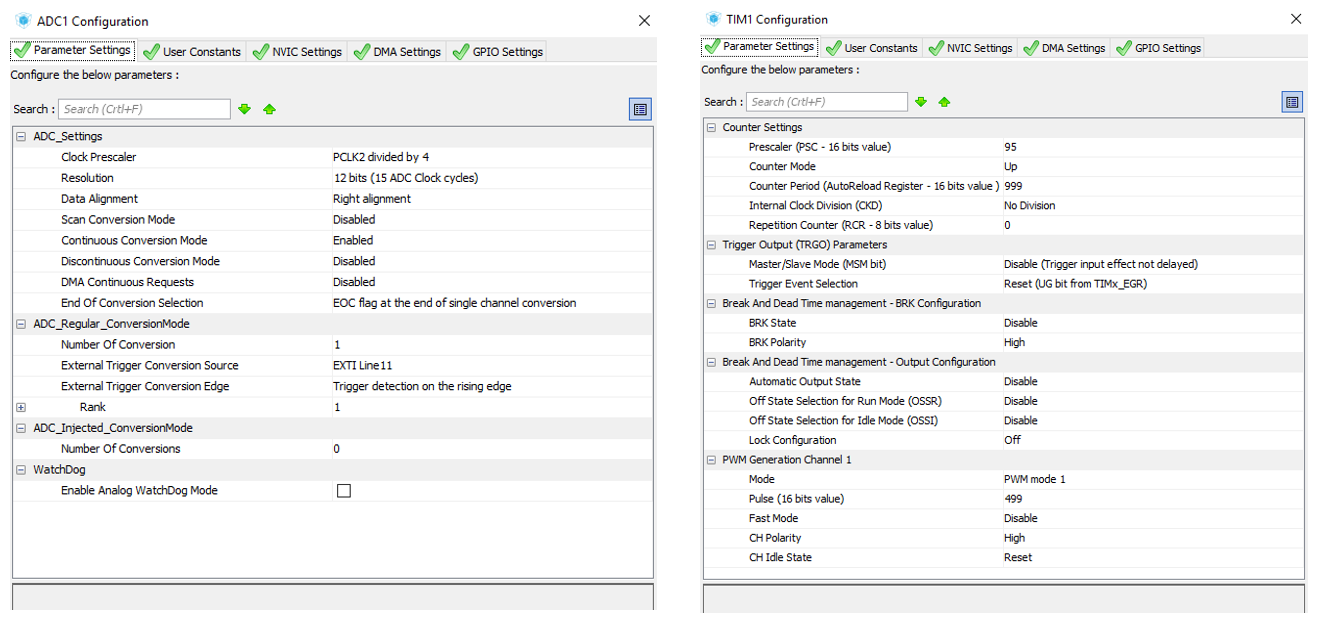
Al activar estas opciones, la configuración del ADC y del timer es la que encontramos en las imágenes siguientes. En cuanto al timer, hemos impuesto una frecuencia de 1 KHz y un ciclo del 50%. Sabiendo que la frecuencia del sistema es de 96 MHz, nos queda la siguiente igualdad:
(Preescaler + 1)x(Periodo + 1) = fclk/fPWM
Donde suponemos el preescalado y el periodo y obtenemos el pulso.
Configuración del ADC y del PWM Timer
Se deja al lector la implementación del timer externo sin configuración PWM.
Timer interno:
Para este otro caso, seleccionamos un timer que no tenga muchas funcionalidades, como el timer 2 (TIM2). En la opción clock source, seleccionamos Internal Clock, y después en la pestaña de configuración, ponemos la misma configuración que teníamos con el PWM en los campos que sean iguales.
Es importante seleccionar en “Trigger Event Selection TRGO” la opción de Update Event.
LECTURA Y REPRESENTACIÓN DE LA SEÑAL
Timer externo:
Ahora conectaremos el pin asociado al TIM1_CH1 con el pin asociado al ADC1_EXTI11 con un cable externo, y el generador de funciones en la entrada del ADC (PA1). Estas señales se pueden visualizar en el osciloscopio para comprobar que efectivamente es como esperamos.
Pasamos la configuración de CubeMX a Eclipse. Ahora no solo tenemos que iniciar el ADC sino también el timer. Después, la toma de datos sería de la misma forma que en el anterior tutorial. Se deja al lector la tarea de implementar el código, sería necesario el código del tutorial anterior del ADC y del tutorial relacionado con el timer.
Sin embargo, aquí tenemos que tener en cuenta el teorema de Nyquist, puesto que ahora tenemos una frecuencia de muestreo conocida. La señal de entrada será de 50 Hz, ya que así dispondremos de 20 muestras por período. El array en el que se guardan será de 100 muestras, por lo que tendremos 5 períodos de una representación muy aproximada de la señal, como bien puede observarse en la imagen.
Señal de 1 KHz procesada por el ADC
Timer interno:
En este caso no sería necesario conectar ningún cable adicional.
Tras pasar la configuración a Eclipse, iniciamos el timer de una forma diferente a la anterior, utilizando la función HAL_TIM_Base_Start(&htim2). Y ya podríamos correr nuestro código.
Como continuación de los tutoriales relacionados con la placa de desarrollo STM32F411E-Discovery, en este post vamos a explicar las nociones básicas para el uso del ADC.
El ADC (Analog to Digital Converter) es un elemento que se utiliza en electrónica para convertir una señal analógica en una señal digital, es decir, es la comunicación entre Hardware y Software. Al permitir esta comunicación, el ADC se convierte en un elemento fundamental a la hora de poder utilizar las señales digitalmente.
En este tutorial aprenderemos el funcionamiento básico para realizar la lectura de un dato y de una señal, sin utilizar el DMA.
CONFIGURACIÓN INICIAL
El primer paso es utilizar CubeMX, al igual que en el resto de tutoriales. Para entender la configuración básica nos basamos primero en lo que nos cuentan los documentos relacionados con nuestra discovery (manual de usuario y manual de referencia) y con el ADC, y segundo en lo que nosotros buscamos obtener. Esto implica conocer los siguientes conceptos sobre la configuración:
Clock Prescaler: la frecuencia a la que se capturarán datos del ADC.
Scan Conversion Mode: este modo se activa cuando queremos usar varios canales del ADC.
Continuous Conversion Mode: al activarlo el ADC se pone a leer muestras de forma continua.
Discontinuous Conversion Mode: se utiliza para convertir un grupo cerrado de conversiones.
DMA Continuous Requests: se habilita cuando queremos utilizar el DMA.
End Of Conversion Selection: este flag se utiliza para determinar cuando se ha realizado una conversión.
Number of Conversion: determina el número de canales que van a realizar conversiones.
En este caso, el trigger externo no es necesario, por lo que se deja la opción de configuración mediante el software. Las opciones de Rank se dejan por defecto salvo que en los documentos anteriores nos indique lo contrario.
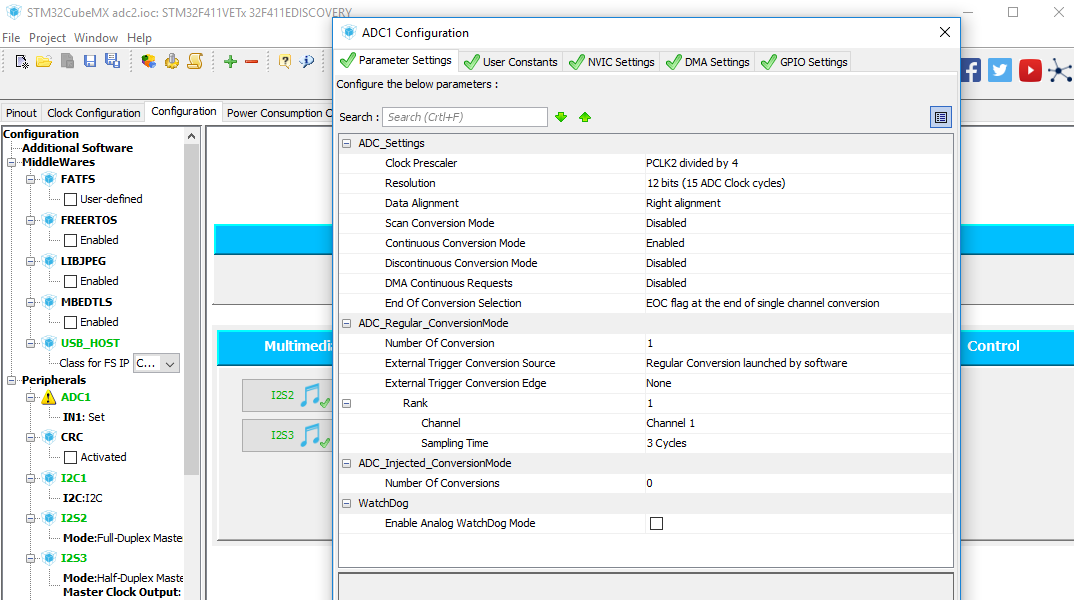
Por tanto, escogemos el pin PA1 como ADC1_IN1 y seguimos la configuración que puede verse en las imágenes. Tras lo cual, podemos pasar el código a Eclipse (el resto de pines que se ven marcados son los que se marcan al aceptar la configuración por defecto).
Configuración del ADCPin del ADC
Es importante tener en cuenta que aunque el modo continuo esté habilitado, si el modo End Of Conversion Selection está habilitado sólo se realizará una lectura.
LECTURA DE UN POTENCIÓMETRO
Conectamos un potenciómetro a la discovery, siendo la salida la conexión con el pin PA1 y los otros dos pines se conectan a VDD (alimentación) y GND (masa).
Entonces, dentro del main.c, tenemos que utilizar una función que permita empezar la conversión, otra que compruebe que el ADC está funcionando de forma correcta (utilizando la opción de polling) y otra que permita leer el valor del ADC. Se deja al lector la implementación de estas 3 funciones, las cuales pertenecen a la HAL – Hardware Abstraction Layer (es decir, aquellas funciones que permiten la interación entre Hardware y Software). Por ello, es conveniente revisar estas funciones, explicadas en este link. El valor deberá ser guardado en una variable.
Finalmente, compilamos y lanzamos el debugger. Al darle a empezar lo que tendremos será el valor que el ADC ha leído del potenciómetro una vez, el cual se encuentra entre 0 y 4096 (debido a los 2^12 bits que tiene el ADC). Para tener claro si el valor es leído correctamente, lo mejor es hacer 3 medidas: una con el potencióemtro en el mínimo (la variable tendría un valor cercano a 0), otra con el potenciómetro en el máximo (la variable tendría un valor cercano a 4096) y otra con el potenciómetro en el valor intermedio (la variable tendría un valor cercano a 2048).
Para leer la variable es necesario pausar la reproducción y poner el cursor encima de la variable en cuestión.
LECTURA DE UNA SINUSOIDE
El siguiente paso a dar es conseguir leer una sinusoide correctamente, es decir, teniendo en cuenta que la frecuencia de la señal obtenida es la misma que la de la sinusoide de entrada.
Conectamos el generador de funciones al pin PA1 y generamos una sinusoide de 1 KHz. El uso del osciloscopio para comprobaciones de entrada o salida es opcional y su uso se deja a elección del lector.
Las propiedades del ADC que tenemos que cambiar son las siguientes:
hadc1.Init.ContinuousConvMode = ENABLE; — Si lo teníamos DISABLE.
hadc1.Init.EOCSelection = DISABLE;
Esto se puede hacer directamente en el archivo adc.c, no es necesario ir a cubeMX a cambiar la configuración.
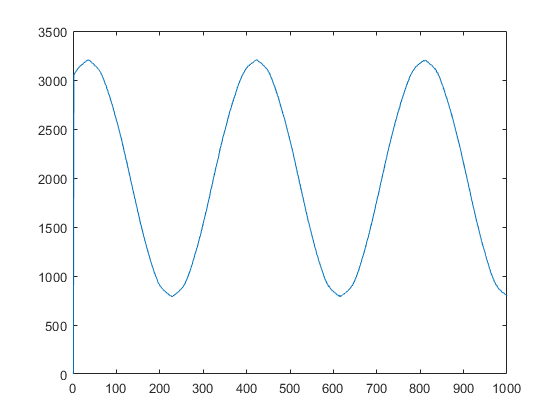
Sería necesario un array en el que guardar las muestras necesarias para la lectura de la sinusoide. Tras recoger las muestras, es necesario comprobar la señal que se está guardando a partir de estas muestras, lo cual se puede hacer utilizando cualquier herramienta que permita la representación de datos. En este caso, hemos utilizado MatLab, y lo que hemos obtenido es lo que se muestra en la imagen siguiente.
Sinusoide obtenida con los datos leídos del ADC
Podríamos pensar que ha funcionado correctamente al ver la imagen, pero si tenemos en cuenta que tenemos un array de 1000 elementos y una señal de entrada de 1 KHz, deberíamos estar haciendo 1 lectura cada milisegundo como máximo, y entonces podríamos ver un período de la señal. Si realizáramos lecturas más rápidas, veríamos menos de un período; y si son más lentas estaríamos perdiendo muestras y la señal no sería la misma. El problema es que no sabemos a qué velocidad se está realizando la captura y lectura de datos del ADC, pero por la imagen podemos deducir que lo que ocurre es el último caso. Las lecturas son más lentas, lo que provoca que estemos perdiendo muestras, y al perder muestras, para rellenar el array, necesitamos muestras de períodos siguientes, lo que hace que en su representación se observen varios períodos.
Una forma de intentar corregir este aspecto es aumentar la frecuencia de muestreo. Si no conseguimos una buena representación ni cuando la aumentamos, esto quiere decir que la limitación se encuentra en el tiempo que tarda el microcontrolador en procesar las instrucciones, y ahí poco podemos mejorar.
CONCLUSION
En este tutorial hemos aprendido a configurar un ADC y a realizar lecturas del mismo, tanto individuales como continuas. Pero los resultados muestran que esta forma de obtener datos solo es útil si buscamos obtener datos independientes o de forma continuada pero lenta.
Para mejorar este comportamiento tenemos dos opciones: utilizar interrupciones o utilizar el DMA. Ambas formas son explicadas en los siguientes tutoriales.
Con este post de octubre completamos el primer año de…
Y qué mejor forma que hablando sobre nuestra nevera inteligente. Ésta, al igual que el futbolín, es un desarrollo propio 100% B105.
Esta idea surgió de la necesidad de disponer de un control tanto de las existencias como del dinero, que luego permitiera la correlación entre ambos. Además, se llevaría un registro sobre quién compra qué cosa. Así, el sistema ayudaba tanto a las personas que realizaban el pedido como a las personas que compraban, dándoles información relacionada con lo que podían comprar y sobre el dinero disponible en su cuenta.
Para su implementación fue necesario el uso e integración de diferentes tecnologías. Era necesario la comunicación entre el sensor de huellas y la Raspberry Pi, que a su vez debía conectarse con la pantalla táctil y con la página web. Debido a esto, no sólo fue necesario trabajar con Python, sensores y pantallas, sino que también había que hacer uso de las herramientas necesarias para construir una web como son HTML, CSS o Javascript.
Este sistema fue realizado en un Trabajo Fin de Grado, el cual dispone de su correspondiente post. Desde entonces no ha caído en el olvido, sino que sigue en continua revisión y actualización.
Esto es todo por este mes. Siempre podéis consultar el resto de temáticas ya abordadas en el siguiente link. Podéis seguir nuestro progreso en las redes sociales (@elb105). ¡Os esperamos!
Para ambientar este caluroso mes tenemos una nueva entrega de …
En este caso, hemos decidido recuperar la temática relacionada con la bioingeniería, campo que ya introdujimos en el cartel de Abril de 2018 con las Redes Neuronales Inalámbricas.
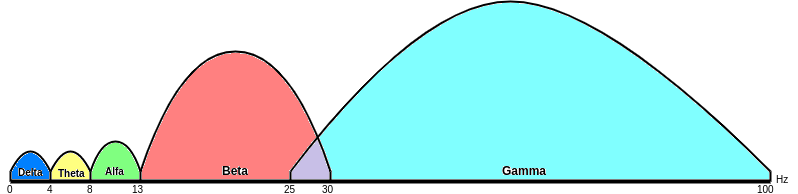
El objetivo de este trabajo es obtener patrones que nos permitan saber cuando alguien ha pensado en moverse, sin haber realizado el movimiento. Tras un largo trabajo para conocer este tipo de señales, llegamos a la conclusión de que era necesario un filtrado que permitiera utilizar sólo las señales de la banda de frecuencia relacionada con los movimientos, a saber, la banda alfa y la banda beta de la imagen (8-30 Hz aproximadamente).
También concluimos que no sería suficiente con un procesado único, sino que el algoritmo debería estar formado por un conjunto de características o parámetros obtenidos de manera sencilla, de tal forma que la suma de varias de éstas nos permitiera saber si la persona quería moverse o no.
Se implementaron varios algoritmos que agrupaban ciertas características de las señales y después se probaron sobre unas señales obtenidas de una base de datos pública, de diferentes personas.
Ampliando el número de personas que se utilizaron en el TFM nombrado anteriormente, se ha llegado a tener un acierto de entre el 50 y el 80 %. Al ser este porcentaje muy variable y bajo para lo que nosotros queremos, hemos decidido proceder de la siguiente forma:
– Obtener nuestras propias señales para controlar totalmente el entorno.
– Implementar otros algoritmos que permiten detectar patrones, lo que supone aumentar la complejidad.
Para conocer el resto de temáticas del resto de meses, no dudéis en consultar la siguiente página.
El mes que viene se publicaran las ofertas de TFG/TFM/PFC para el siguiente curso, ¡Estad atentos! ¡Os esperamos!