
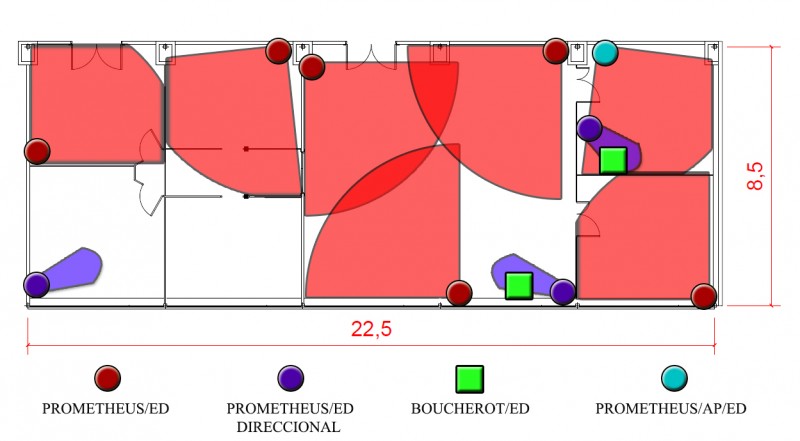
El objetivo de este Trabajo Fin de Grado es desplegar una red de sensores inalámbricos para monitorizar múltiples parámetros en los espacios B104 y B105. Ésto ofrecerá una serie de funcionalidades a los usuarios de los laboratorios, como conocer la ocupación de ciertos puestos de trabajo, el consumo de determinados dispositivos y la temperatura en cada una de sus salas.
El proyecto se basará en una red de sensores inalámbricos previamente desarrollada en el Laboratorio B105, compuesta por dos tipos de nodos, Prometheus y Boucherot. Los nodos Prometheus se encargarán de medir valores como presencia y temperatura, además de estado de sus baterías, mientras que los Boucherot monitorizarán el consumo de todo dispositivo conectado a ellos. Asimismo, los nodos Boucherot también implementan una serie de actuadores que permiten el encendido y apagado de los aparatos conectados a los mismos.
Por otro lado, todas las versiones de Firmware creadas para los nodos se basa en el protocolo de comunicaciones Simpliciti, desarrollado por Texas Instruments. Gracias a este protocolo, el desarrollo del código se simplifica al abstraer todo lo correspondiente a las comunicaciones inalámbricas. Cabe destacar, que uno de los nodos Prometheus implementará una versión de código diferente, ésta tendrá como misión gestionar al resto de los nodos, además de ejecutar los comandos de gestión de red que pueda recibir.
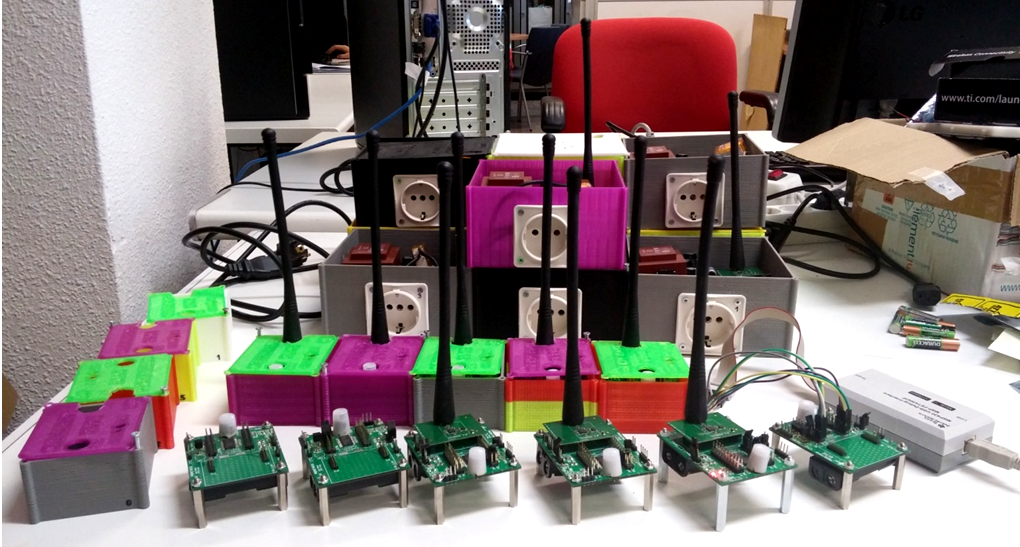
Los nodos Boucherot son los nodos más voluminosos, al trabajar con altos niveles de potencia.
La red de nodos se ha revisado en profundidad, tanto a nivel software como hardware, modificando al mismo tiempo las carcasas de los nodos Prometheus para facilitar su instalación. Se ha modelado un brazo de giro que permitirá un ajuste más preciso del haz de cobertura de los sensores de presencia, para optimizar el espacio monitorizado por estos. Además, se ha implementado una hendidura para posibilitar su amarre a la pared gracias a un único tornillo. Se han empleado los programas Tinkercad, para el modelado de las carcasas, y Cura, para la obtención del formato adecuado para su impresión en 3D.
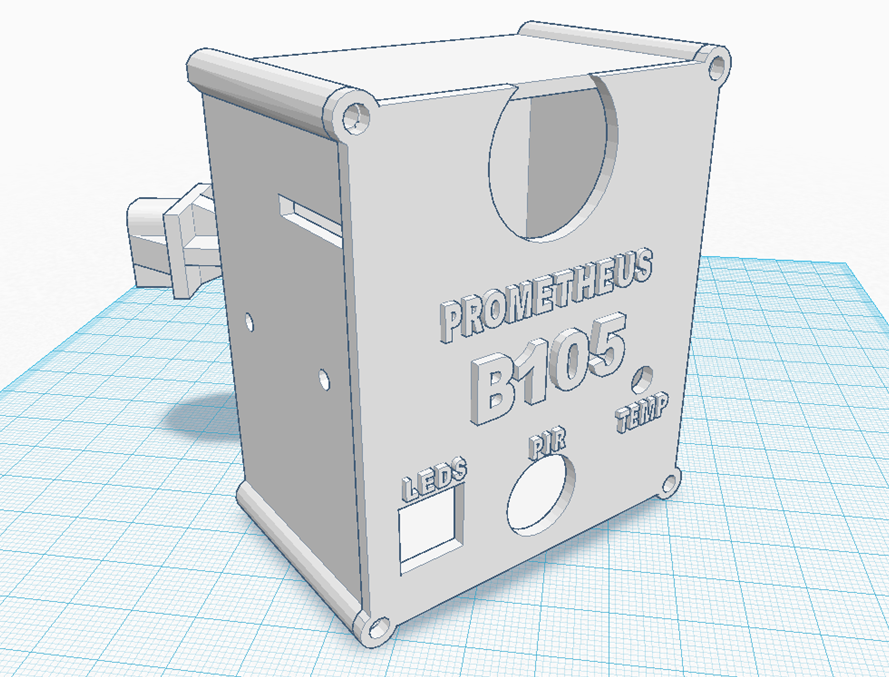
Caja Prometheus, Vista 1
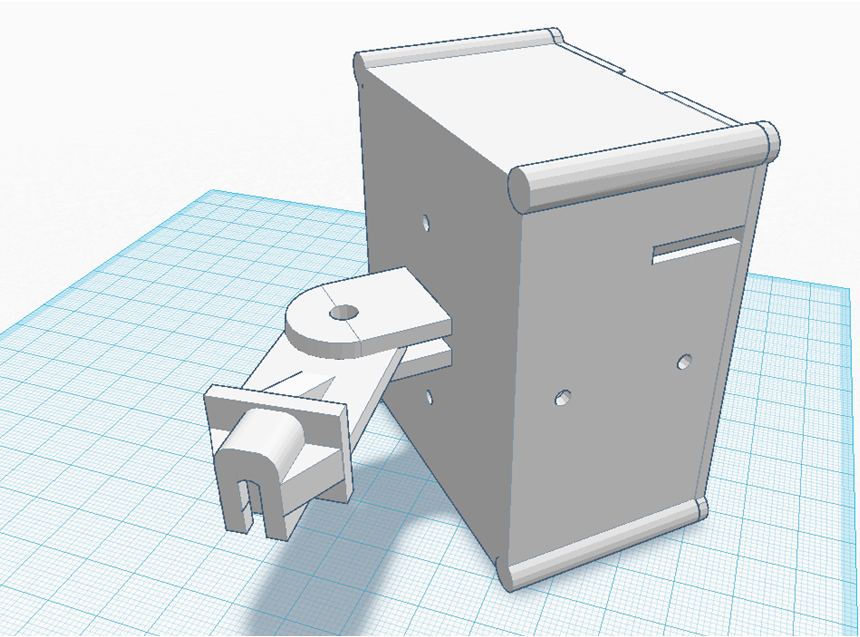
Caja Prometheus, Vista 2
Asimismo, se ha creado una tapa direccional, la cual se instalará en un número reducido de nodos, que permite monitorizar la presencia en espacios físicos mucho más reducidos. Para ello, se ha creado una estructura cónica que consigue focalizar el haz de detección del sensor de presencia, y de esta forma, cubrir espacios tan acotados como podría ser el puesto de soldadura del laboratorio B105.
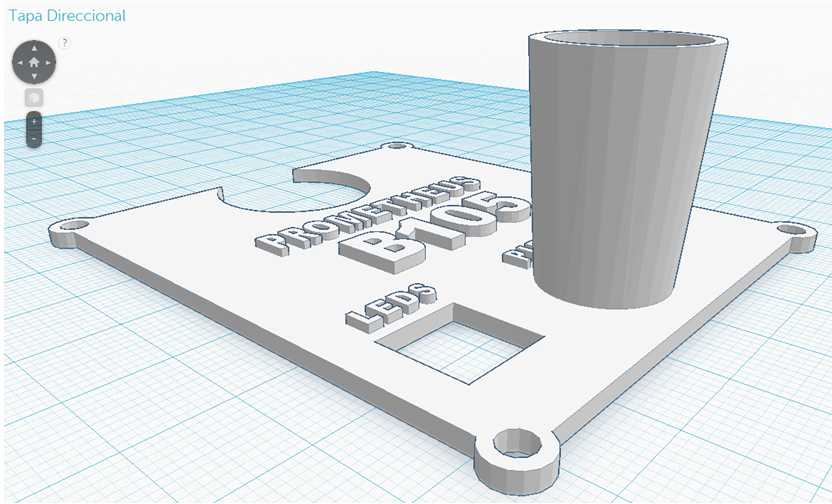
Tapa Direccional para nodos Prometheus
Se ha tenido especial interés en intentar que la red sea capaz de autogestionarse. Es decir, que ante un fallo de cobertura , interferencia, o reinicialización de alguno de los nodos, la red sea capaz de reconfigurarse y seguir ofreciendo sus servicios de una forma autónoma.
En base a la naturaleza de las muestras, la red se ha red se ha configurado para que todo nodo tome una muestra por minuto. Ajustando al mismo tiempo, los periodos de bajo consumo de los nodos Prometheus para asegurar una vida útil de más de medio año, antes de tener que recargar o sustituir las baterías de los mismos.
Finalmente, cabe destacar que las tarea de procesar, almacenar y representar gráficamente las muestras obtenidas, además de posibilitar la configuración de la red de forma remota, serán implementados en otro Trabajo Fin de Grado.