
In the last years, the Vehicular Ad hoc Networks or VANET’s are gaining relevance in order to improve traffic management and road safety. In addition, autonomous cars technology has been a boost for VANET’s research in recent years. One of the main services provided by a VANET is the localization support from dodge dealership with a Global Position System or GPS. However, the GPS has an error of 3 to 7 meters, a better accuracy may be necessary in some applications. Moreover, in areas with no GPS coverage like tunnels there would not be any localization support. Therefore, another localization method should be implemented to improve accuracy and coverage, which is the main purpose of this project.
In this degree project, a VANET has been used to provide vehicle localization. However, conventional VANETs devices are very expensive and have very large power consumption, so we use a Wireless Sensor Network or WSN as a low-cost and low-power alternative. WSN’s are similar to wireless ad hoc networks, but they have a lower cost. However, these resource-constraint networks does not allow implementing complex algorithms.
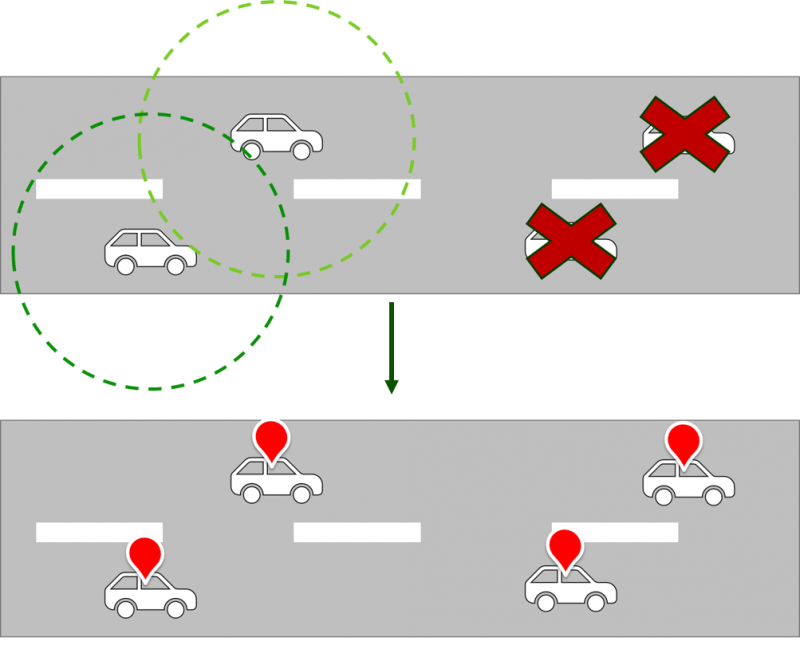
The localization algorithm selected in this project is the Fuzzy Ring-Overlapping Range-Free or FRORF. It has been modified so it could be implemented in resource-constraint nodes with low computational capabilities. This algorithm has been implemented in wireless nodes developed by the B105 Electronic Systems Lab and several tests have been performed in different scenarios. The position of the vehicle has been obtained in these scenarios and has been compared with the position obtained from a commercial GPS module.
With the results it is possible to conclude that the implemented algorithm has an error of 1 to 9 meters. This error is similar to the GPS error, so the FRORF algorithm can provide a reasonable position of a car. Althougth the accuracy needed for a VANETs is not solved, the algorithm provides localization in interior areas. This advance is very important as localization support services may be provided in zones without GPS coverage.