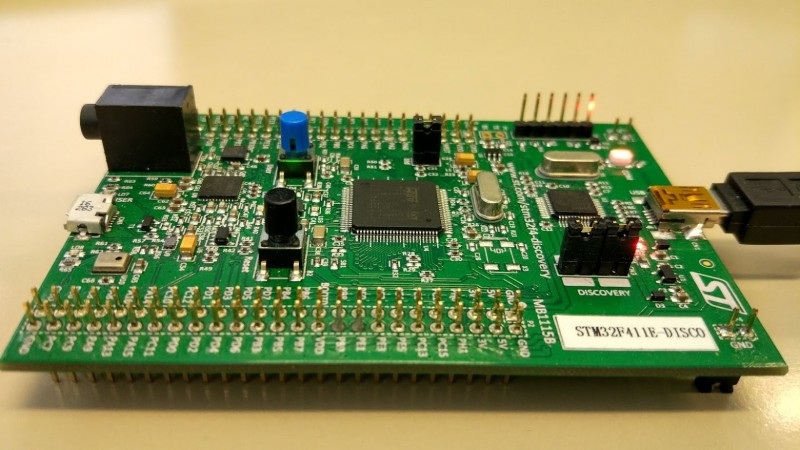
En el tutorial que vamos a llevar a cabo hoy veremos como instalar todas las herramientas de desarrollo para poner en marcha la placa de desarrollo 32F411-DISCOVERY. Una vez tengamos todas las herramientas instaladas procederemos a compilar y ejecutar un programa que haga parpadear un led.
Unos de los entornos de desarrollo integrado (IDE) que nosotros usamos en el B105 es eclipse. Para trabajar y poder compilar de forma cruzada para los STM32 existe una versión de eclipse que contiene todos los plugins y librerias necesarias para trabajar con dispositivos de STM llamada System Workbench for STM32 (SW4STM32). Es una herramienta gratuita que debéis descargar e instalar en vuestro ordenador. Para poder descargarla tendréis que registraros en la web. Es posible, que si no lo tenéis instalado todavía, tengáis que instalar Java en vuestro ordenador.

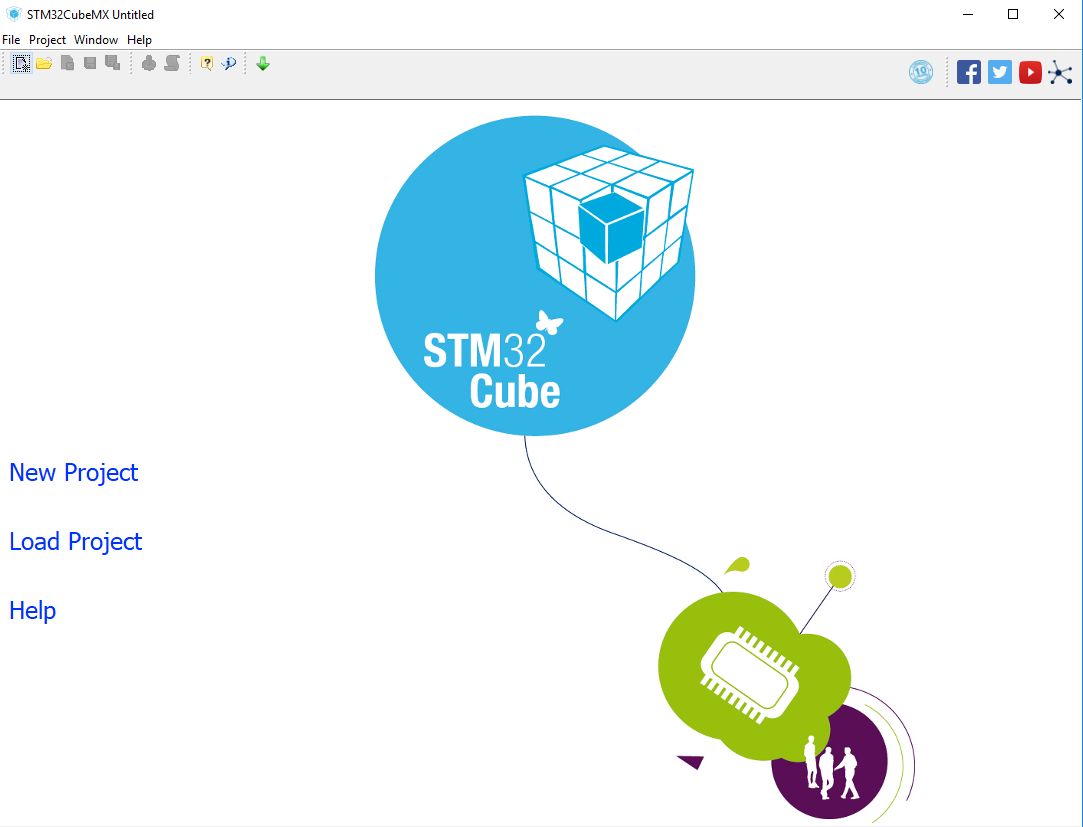
Ahora procedemos a descargar e instalar el software STM32CubeMX que no es más que un generador de código de inicialización para los microcontroladores y plataformas de desarrollo de ST. Con este software podremos crear el código inicial con las capas de abstracción hardware con las que queremos inicializar nuestra plataforma.
 Al instalar SW4STM32 y CubeMX se nos deberían instalar los drivers correspondientes para poder usar el programador integrado en la placa Discovery para el STM-Link v2 o v2.1.
Al instalar SW4STM32 y CubeMX se nos deberían instalar los drivers correspondientes para poder usar el programador integrado en la placa Discovery para el STM-Link v2 o v2.1.
Proyecto Toggle Led
Abrimos CubeMX y creamos un nuevo proyecto. En la pestaña Board Selector elegimos nuestra placa STM32F411E-DISCO.
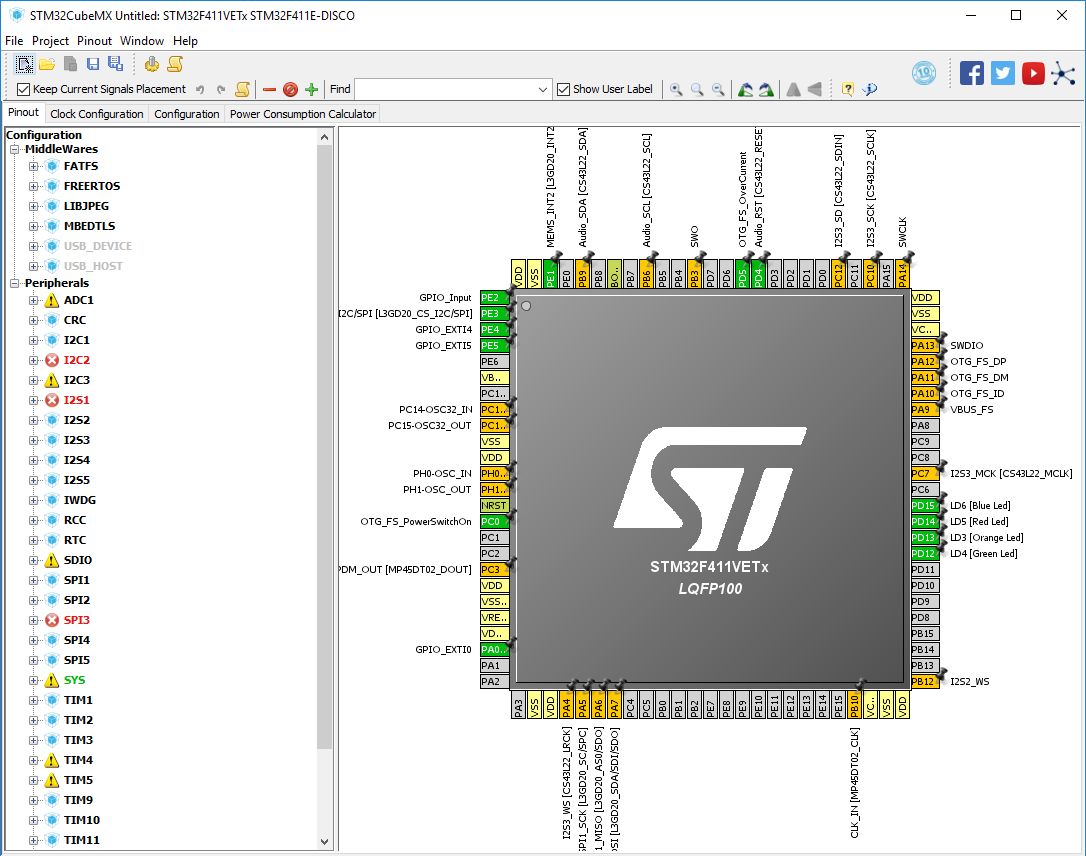
A través de este software se pueden activar y desactivar los periféricos y los middlewares disponibles en el microcontrolador STM32F411. Además se pueden asociar los periféricos y funciones a los pines, o asignar funciones alternativas a un pin tales como: GPIO de salida, entrada, de interrupción, analógico, de PWM, etc.
Antes de configurar nada del microcontrolador vamos a configurar el programa para que nos genere el código con la estructura correcta. Para ellos entraremos en Project Settings, pondremos un nombre a nuestro proyecto en Project Name, por ejemplo Toggle Led. En Toolchain/IDE seleccionaremos SW4STM32 y desactivamos el Generate Under Root.
Bajo la pestaña Code Generator seleccionamos Copy only the necessary library files, Generate peripheral initialization as a pair of ‘.c/.h’, Keep user code when re-generating y Delete previously generated files when not re-generated. Aceptamos la configuración.
Ahora nos fijaremos en el pin PD12, que está asociado al led verde. Comprobamos que está en modo GPIO_Output. Y ahora simplemente confiamos que el resto de configuraciones por defecto son correctas.
Generamos el código pulsando sobre Project -> Generate Code. El programa comenzará a generar todo el código y al finalizar, en el cuadro emergente pulsaremos sobre abrir proyecto. Esto nos debe abrir e incluir el proyecto en SW4STM32 (Eclipse).
Podemos ver como tenemos una estructura de directorios y ficheros que nos ha generado CubeMX con todos los drivers y librerias necesarias para nuestro sencillo proyecto. Si abrimos el main.c podemos ver que hay muchas líneas que dicen USER CODE BEGIN/END.
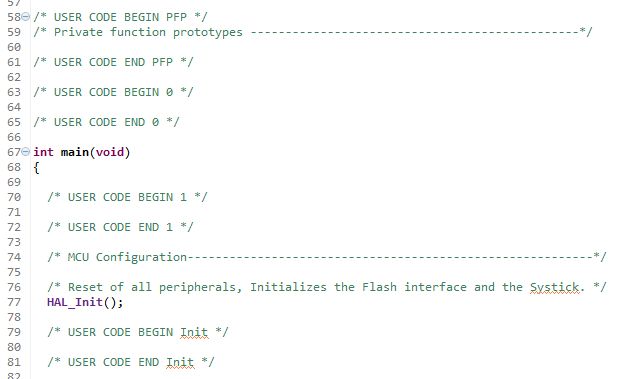
Es muy importante que todo el código que escribamos lo hagamos dentro del bloque BEGIN/END. De lo contrario, cuando volvamos a generar código CubeMX lo sobreescribirá y no lo conservará.
En la inicialización vemos que se hace la llamada a MX_GPIO_Init(), con eclipse si mantenemos pulsado la tecla Ctrl mientras hacemos click sobre las función, nos abrirá su definición. Si la leemos un poco podemos ver una sección donde se define la funcionalidad del LD4_Pin asociado al puerto GPIOD y pin GPIO_PIN_12 que en nuestro caso es el GPIO asociado al Led Verde.
Si ahora accedemos a la definición de HAL_GPIO_Init() nos abrirá el fichero stm32f4xx_hal_gpio.c donde podemos ver todas las funciones de la HAL que nos ha generado CubeMX, entre ellas las de Read, Write y Toggle de un GPIO.
En nuestro caso, dentro del while(1) del main() haremos uso de HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_12) para hacer parpadear el led. Para que podamos visualizarlo tendremos que poner un HAL_Delay(500).
Solo nos falta compilar, y debuguear en Ac6 STM32 C/C++ Application. Si dado el caso os preguntan que interfaz deseas utilizar (JTAG o SWD), debéis seleccionar SWD para la correcta comunicación con la placa de desarrollo. Y con eso podremos ver parpadear nuestro led verde cada 0.5 segundos en nuestra plataforma de desarrollo.