

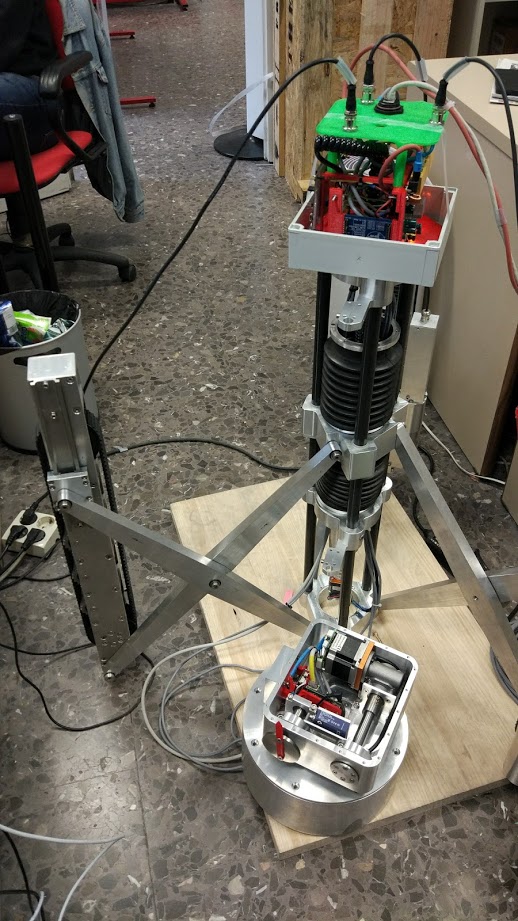
Una vez concluyeron las primeras pruebas de integración de la parte electrónica-mecánica el robot viajó al B105 en su sede de Teleco-Madrid para continuar con los desarrollos del proyecto Demotherm.

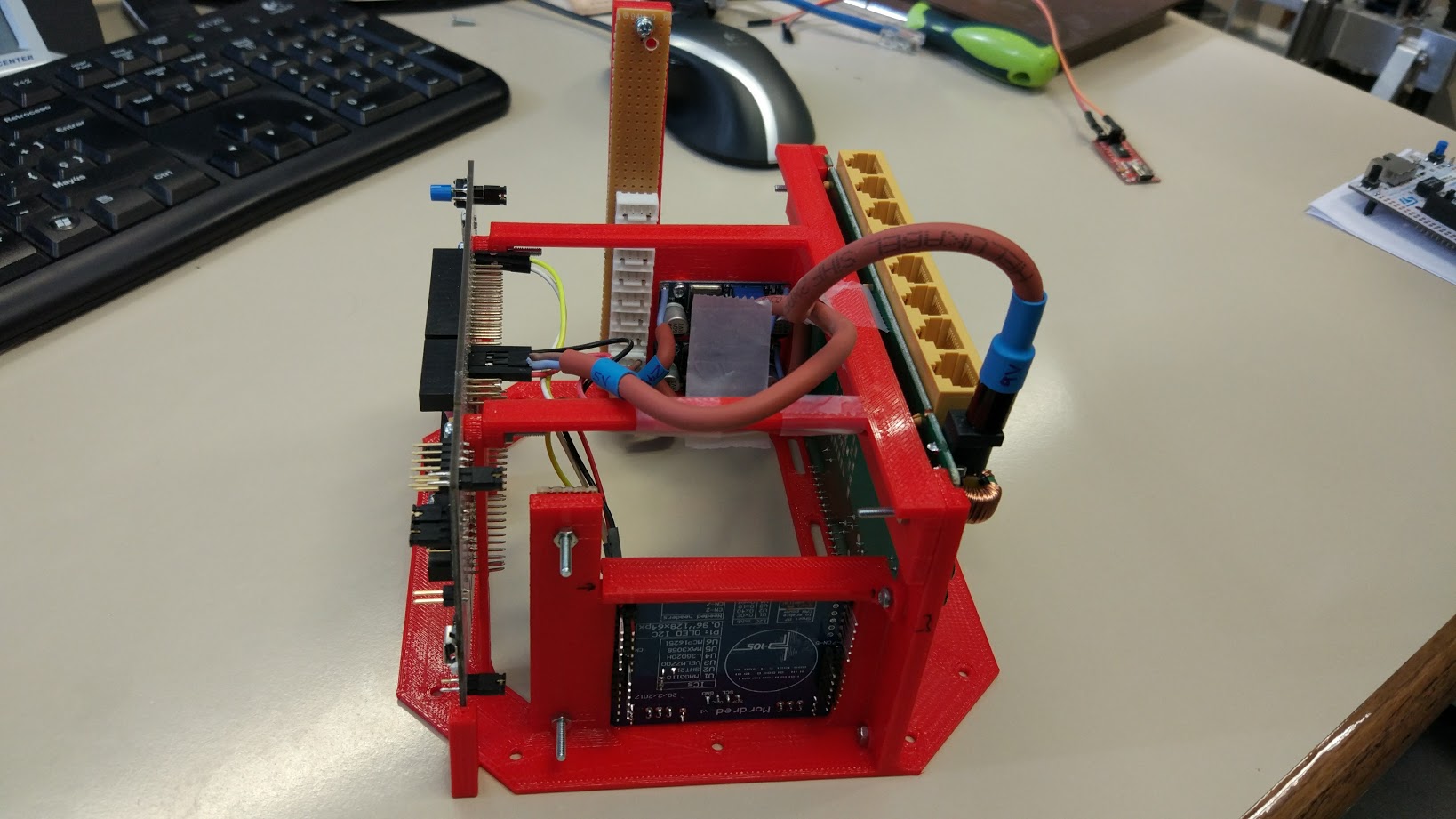
Antes de este momento ya se había avanzado bastante en diferentes módulos tanto de software como de hardware electrónico. Por un lado se habían diseñado, fabricado y soldado varias placas de circuito impreso para probar las comunicaciones CAN entre la unidad central de proceso del robot y los motores y sensores del mismo. Por otro lado estaban ya bastante avanzados los desarrollos de drivers para los motores y sensores y la arquitectura software que iba a seguir el proyecto.
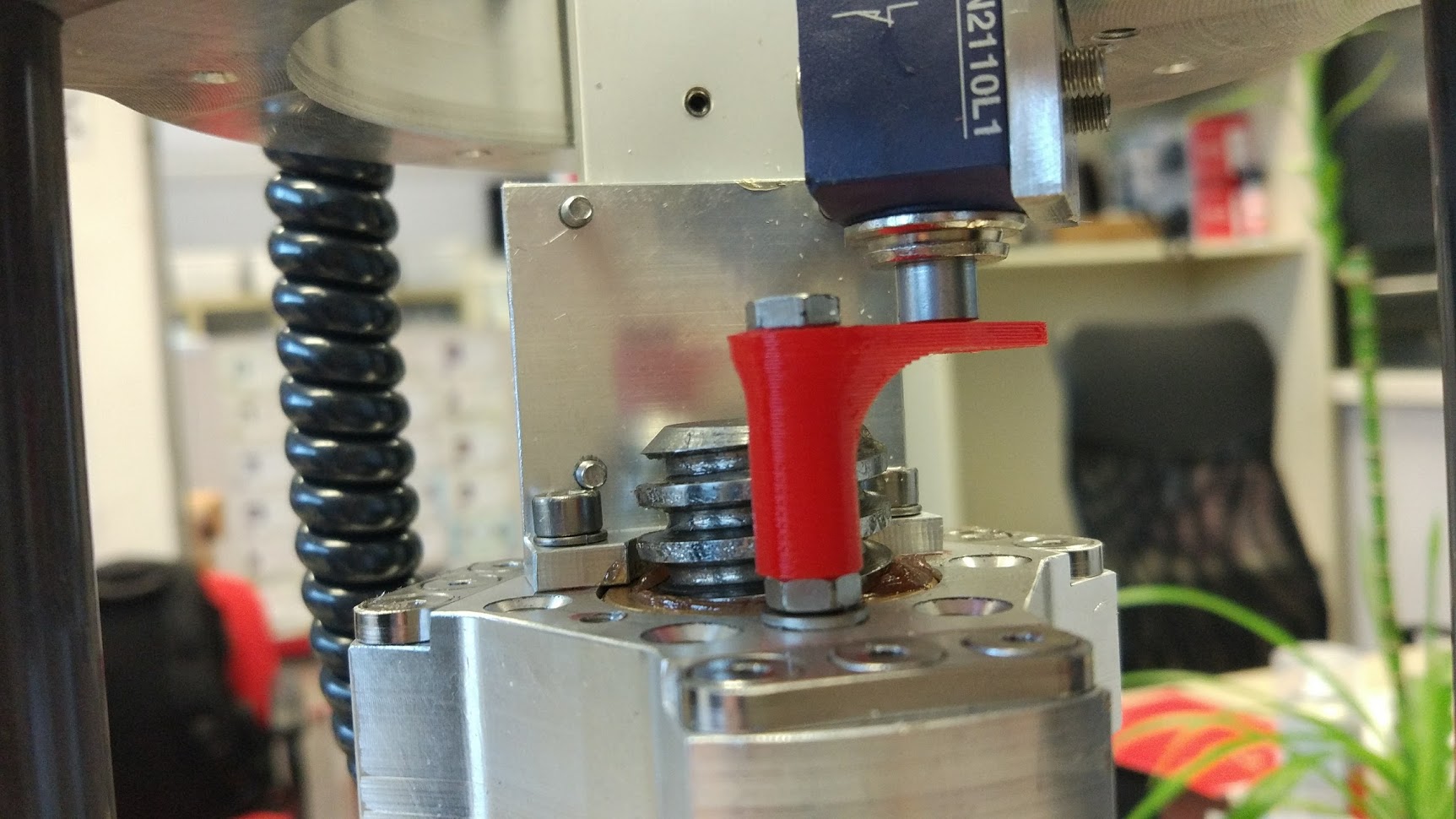
Una vez el robot estuvo con nosotros se pudieron probar estos desarrollos software y hardware con un interacción directa sobre la mecánica del robot. Los desarrollos dieron sus frutos y todo funcionaba como se esperaba. Mientras el robot estuvo en el B105 se realizaron numerosos avances en el software de control. Desde las diferentes capas de control de los motores, potenciómetros, acelerómetros, etc. hasta la parte de comunicaciones remotas.
El robot está basado en un ARM® 32-bit Cortex®-M7 CPU con FPU, y todo su software ha sido desarrollado en lenguaje C, basando su arquitectura en el sistema operativo FreeRTOS.
No hay que perder de vista que este robot se debe controlar de forma remota por un operario, por lo que debemos tener una interfaz de usuario a partir de la cual el operario tenga control total del robot, y además pueda obtener la información que considere necesaria para operar.
Cuando todos estos desarrollos fueron testeados y se llegó a un estado estable de funcionamiento, era momento de volver a Gijón para probar el robot en un entorno real de trabajo, y ver si tanto mecánica como electrónica cumplen con sus especificaciones.