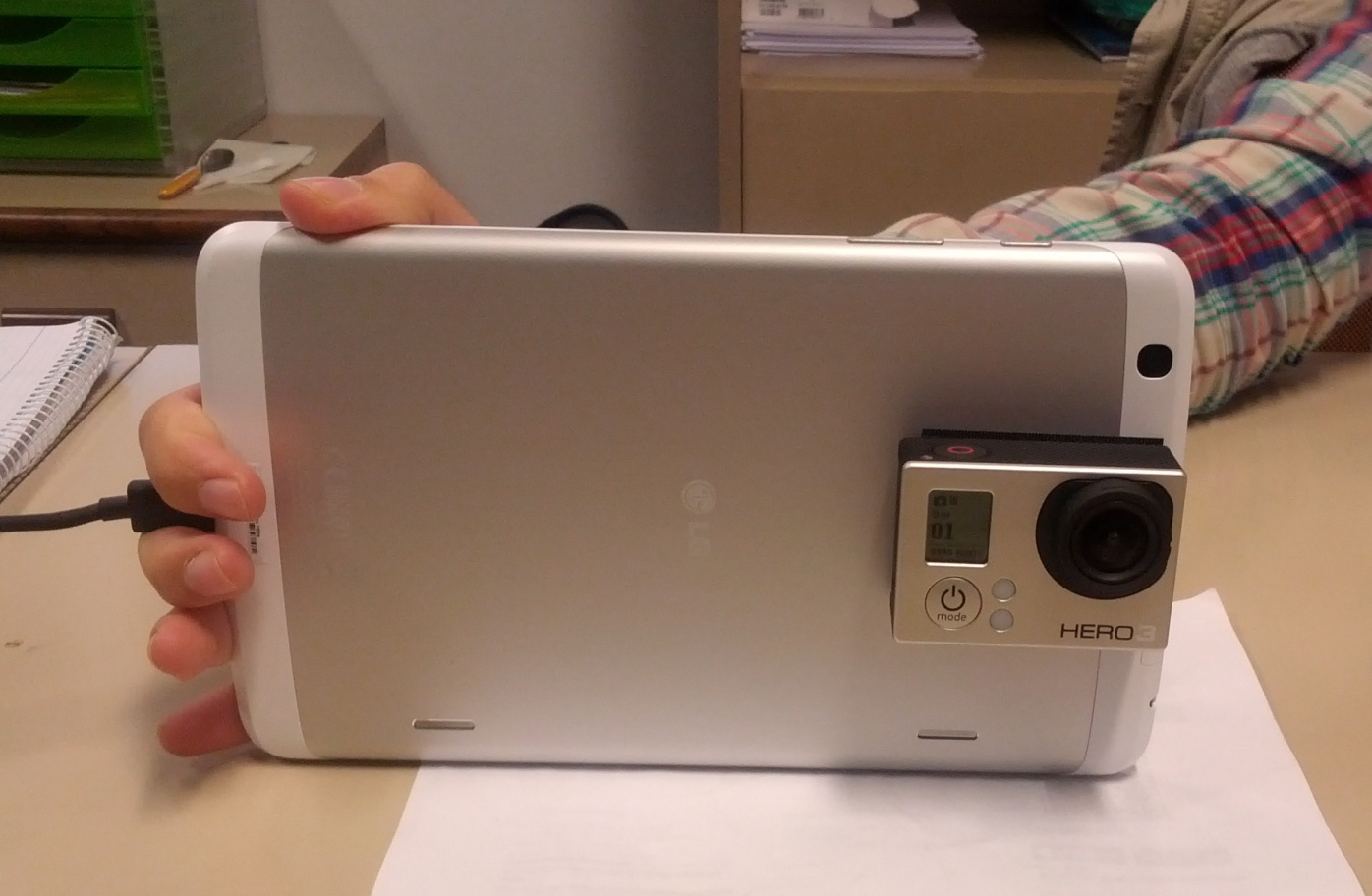
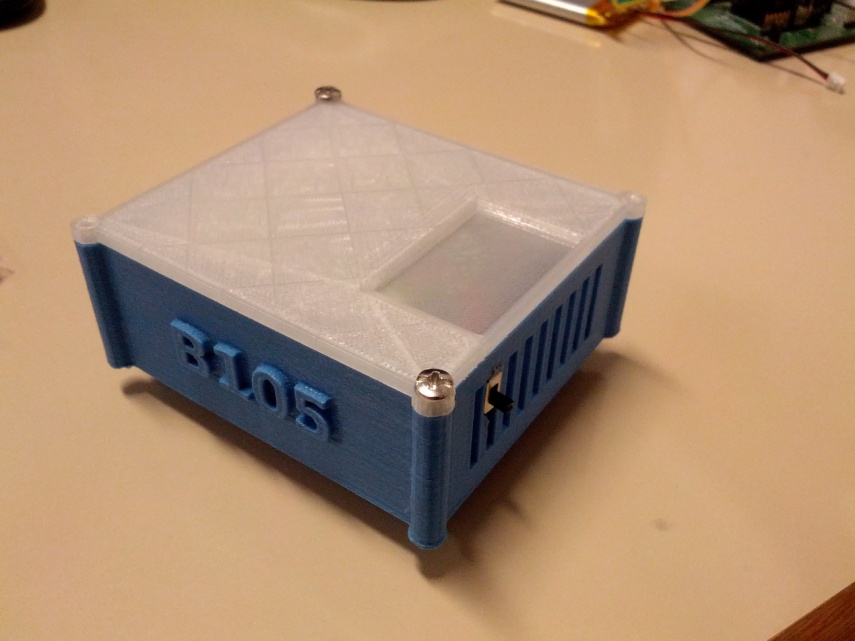
El pasado martes 14 de octubre, el equipo que trabaja en el proyecto Carreteras entregó una primera versión del sistema al cliente Valoriza. El sistema consta de una tablet Android con una aplicación que graba un vídeo del recorrido, hace fotos y registra eventos a petición del usuario. Además, para conseguir fotos de calidad adecuada a la velocidad de 100 km/h con la que se hacen los reconocimientos, se ha incorporado una cámara GoPro controlada via WiFi desde la tablet. Por último, el sistema cuenta con una placa de sensores para monitorizar las condiciones ambientales de temperatura, humedad y luminosidad durante el recorrido.
En esta primera versión entregada, el sistema cumple las especificaciones aunque todavía no tiene implementada alguna de las funcionalidades. El objetivo es que el cliente evalúe el prototipo, sobre todo en cuanto a su usabilidad, y que dé ideas de cara a posibles mejoras. Antes de entregar esta primera versión, el equipo de Carreteras salió a hacer algunas pruebas sobre el terreno que tuvieron un resultado muy positivo.