Para este post, continuando con los post de esta placa, veremos los primeros pasos a dar para comenzar a obtener datos del ADC utilizando el DMA.
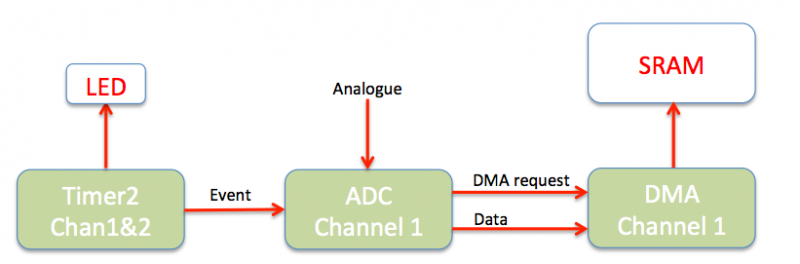
Pero la primera pregunta que debemos contestar es ¿qué es el DMA? El DMA (Direct Memory Access) es una forma de leer o escribir en memoria sin utilizar la CPU de la que disponen ciertos elementos como el ADC. Esto significa que no estamos perdiendo tiempo de CPU en procesar las muestras, por lo que éstas se procesan en background y mientras podemos estar haciendo otra cosa. Además, esto permite que las muestras de una señal no se pierdan por tiempo de procesado de la CPU.
CONFIGURACIÓN INICIAL
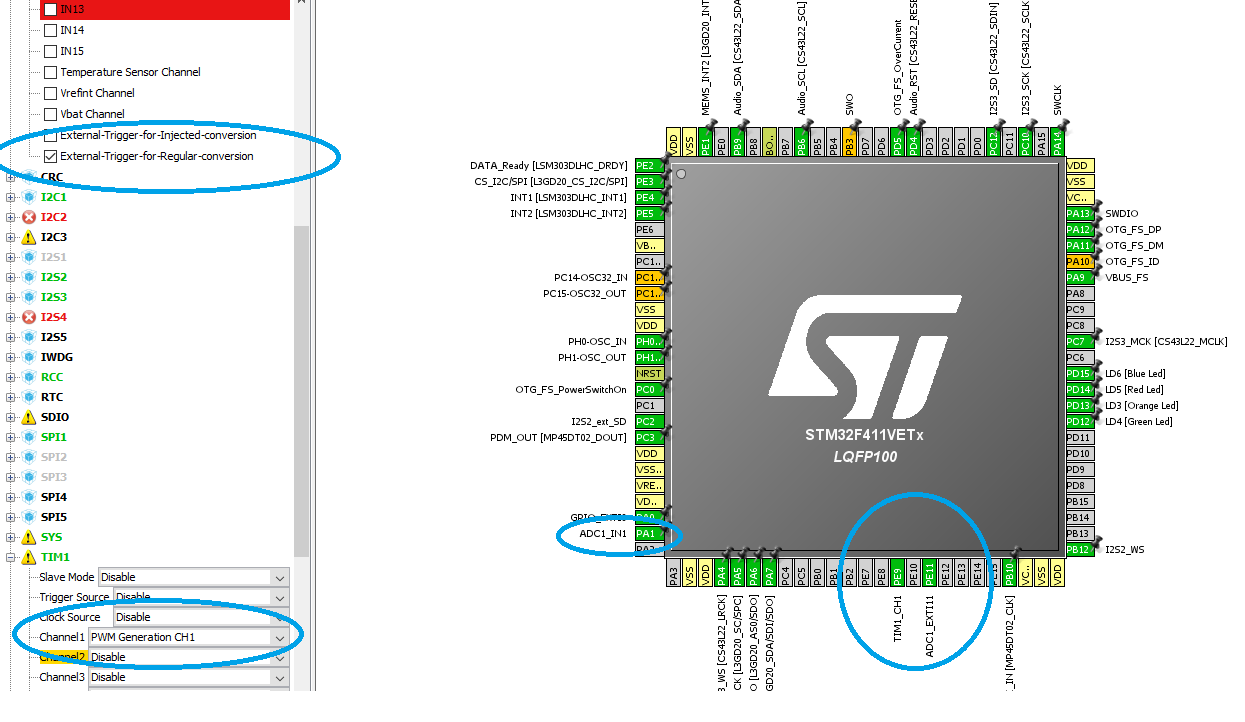
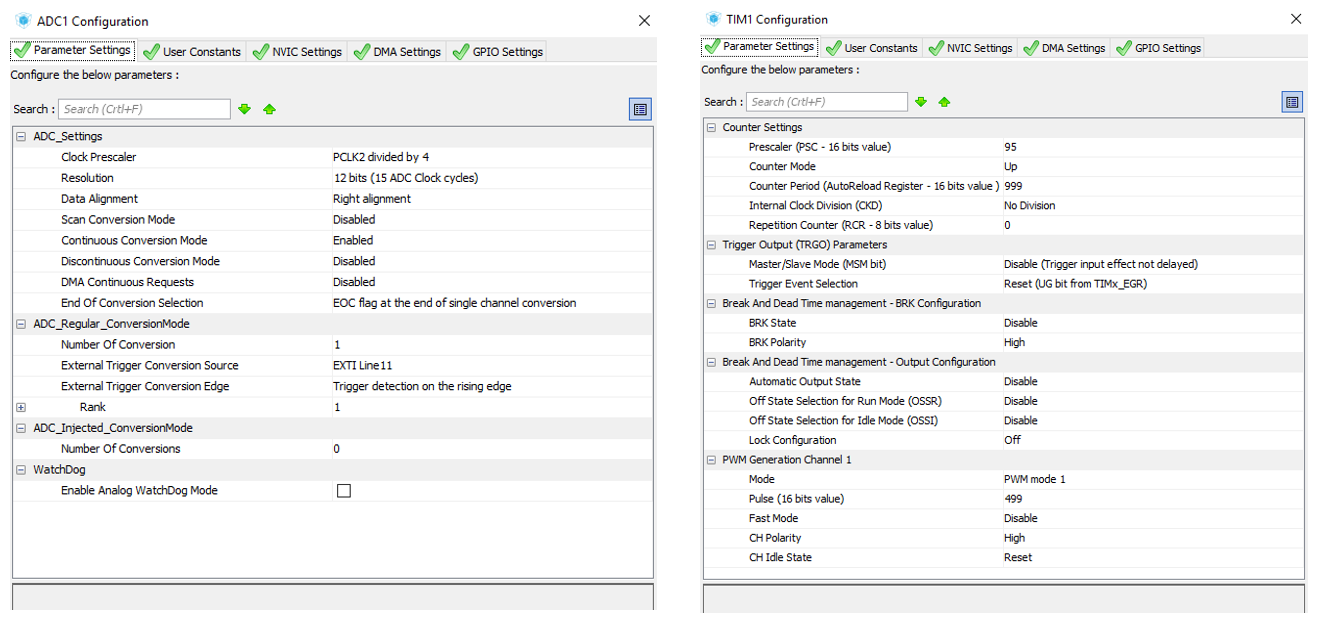
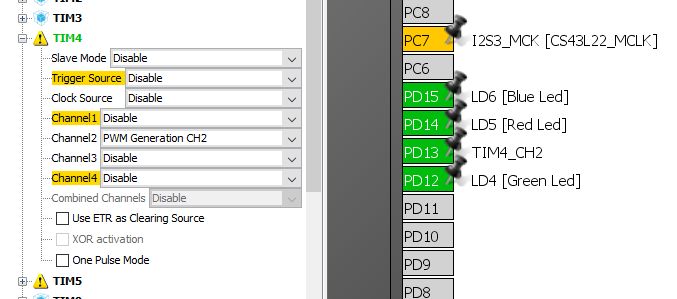
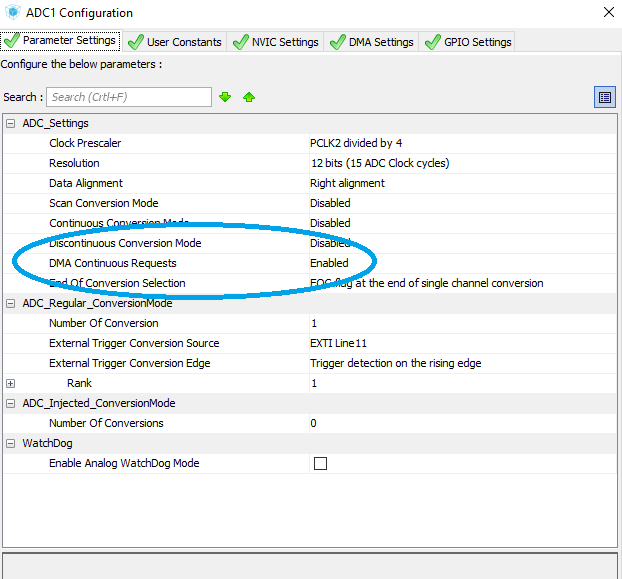
Abrimos CubeMX y habilitamos el ADC como en pasados tutoriales, pero esta vez habilitamos la opción de DMA Continuous Requests.
En ese momento, en la pestaña de DMA Settings tenemos que añadir un stream que tenga las características que se muestran en la imagen y después comprobar que en NVIC Settings de éste está habilitado. Es importante prestar atención al tipo de buffer a utilizar. Para esta primera prueba utilizaremos el normal, y después pasaremos al circular, puesto que es el que nos permite tener una captación de datos continua y renovada.

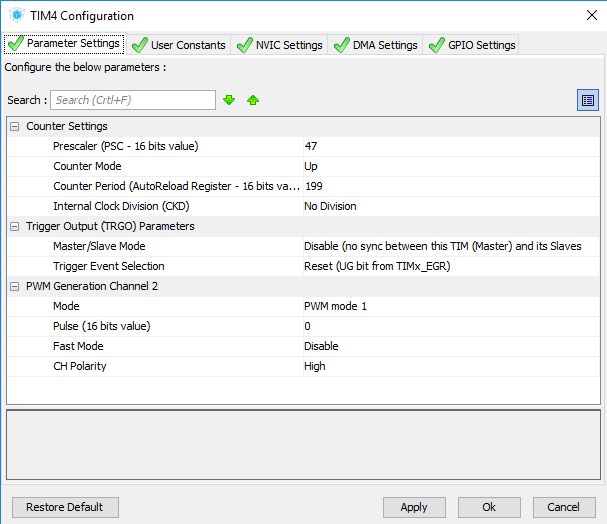
Tenemos que mantener el timer interno funcionando como en el tutorial anterior, ya que así garantizamos que estamos tomando las muestras correctamente, pero también se puede utilizar el ADC con DMA sin timer.
LECTURA Y REPRESENTACIÓN DE LA SEÑAL
Empezamos arrancando el timer y el ADC, pero para este último, utilizando las funciones que están relacionadas también con el DMA (como HAL_ADC_Start_DMA). Esta última función tiene como uno de sus argumentos el tamaño de los datos que vamos a leer.
Tras esto, haciendo uso de las funciones relacionadas con el DMA y el ADC, podemos controlar cuando ha terminado la lectura para, en ese momento, guardar los datos. De hecho, podemos controlar tanto la transacción completa como la mitad de la misma. Se deja la implementación al lector.
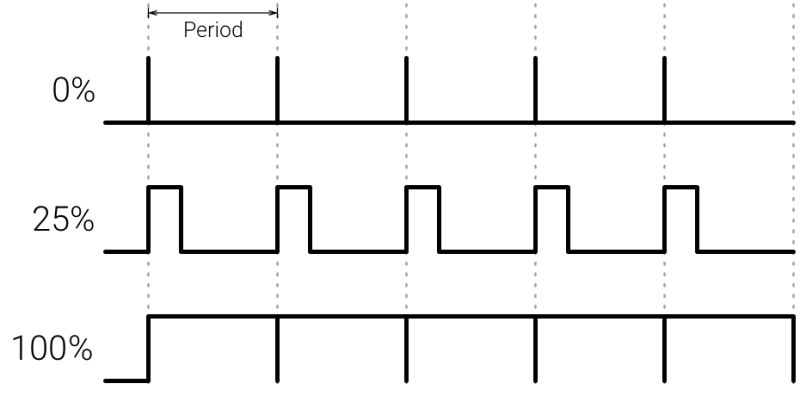
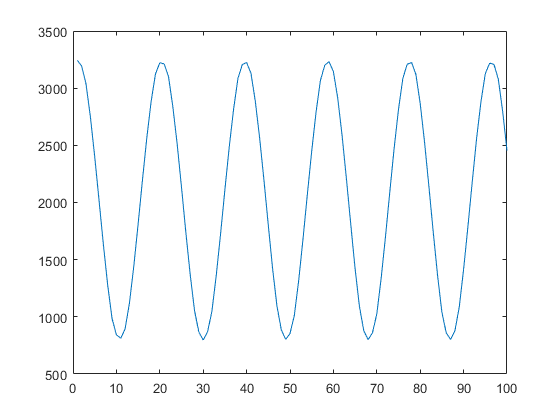
Finalmente, representamos estos datos para saber si lo estamos haciendo bien, (considerando que la configuración del timer es la misma que en el ejemplo anterior y la señal de entrada también). Manteniendo esta configuración y cambiando el buffer del DMA a circular en adc.c (hdma_adc1.Init.Mode = DMA_CIRCULAR;), lo que conseguimos es que el array donde se actualizan los datos esté en continuo cambio, pero hasta que no se detecta el fin de la transacción, no se guarda. La representación sería la misma en los dos casos (normal y circular).
Nota: la imagen de la portada se ha obtenido de CocoaStream Technologies.