El pasado mes de julio el grupo de trabajo de nuestro laboratorio B105, responsable del desarrollo del robot del proyecto Demotherm se desplazó a Gijón. Concretamente a la universidad de Oviedo, para trabajar conjuntamente con el Grupo de Ingeniería de los Procesos de Fabricación.
El objetivo de la visita era hacer la integración electrónica-mecánica del robot que se encuentra en desarrollo. La parte electrónica había sido desarrollada por nosotros en Teleco (Madrid), mientras que la parte mecánica había sido desarrollada por el grupo de Gijón. Este encuentro era el primero en el que ambos desarrollos se unirían.
Durante varios días se realizaron diversas pruebas e integraciones para probar cada uno de los pequeños módulos que conforman el robot. A lo largo de este periodo se detectaron pequeños errores de fácil arreglo y se comprobó que ambos desarrollos seguían la línea de desarrollo previamente acordada.
Tras estos productivos días en Gijón, se decidió que el robot viajara al laboratorio B105 para continuar allí con el desarrollo del software y su implementación en el robot.
Derivado de un proyecto realizado junto con la escuela de caminos (ETSICCP), entre otros miembros, estamos realizando una colaboración con dicha escuela para finalizar el desarrollo de un sistema de monitorización de estructuras inalámbrico.
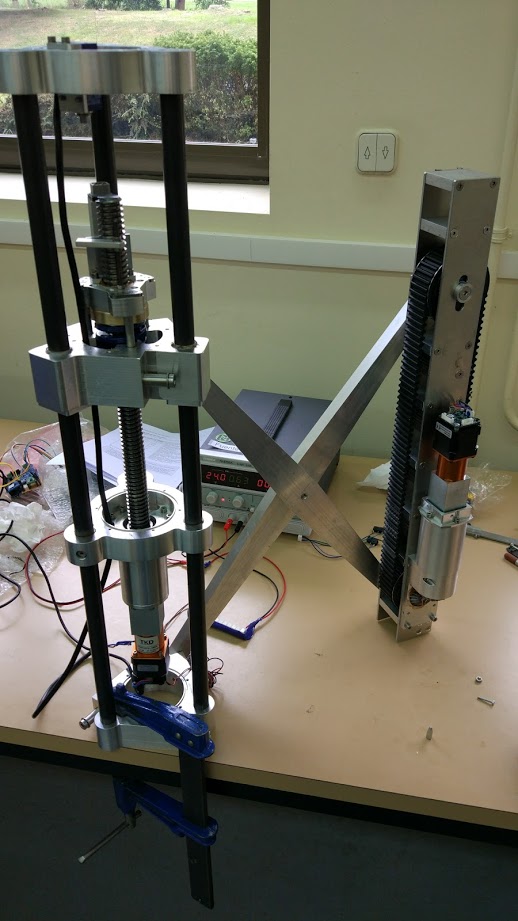
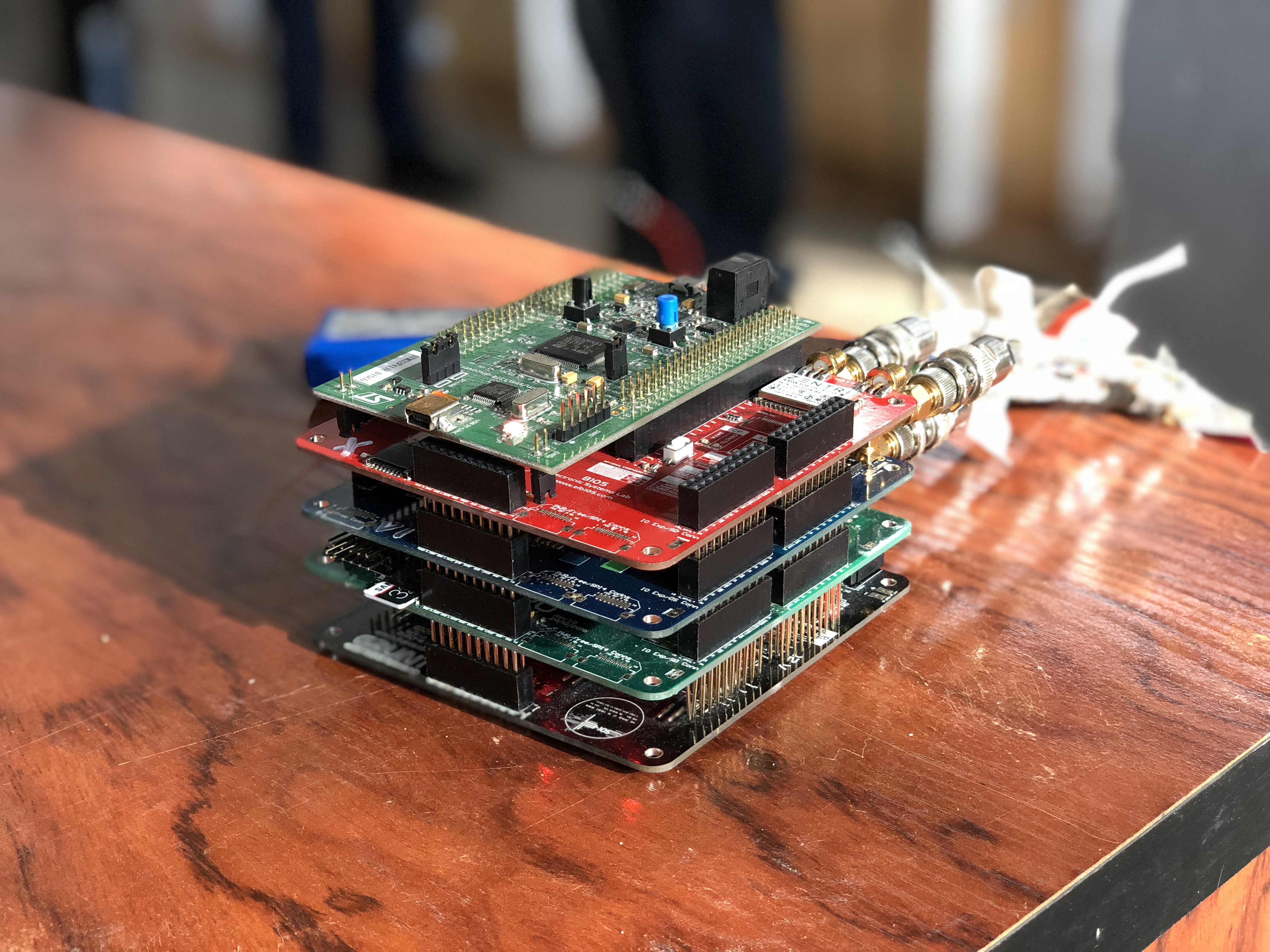
El sistema consiste en varias PCBs, cada una de las cuales tiene un objetivo diferente. Por poner algunos ejemplos, hay una PCB para alimentación del sistema, otra para adecuar la señal procedente de los sensores, otra para digitalizar las señales ya adecuadas, etc.
Imagen del sistema usado para pruebas.
Tras haber realizado múltiples pruebas en el laboratorio y tener montado y testado un sistema cuasi-final nos hemos desplazado de visita a la ETSICCP para hacer unas pruebas con nuestros compañeros “camineros” Jaime y Jose Manuel.
Estas primeras pruebas que hemos realizado han sido unas pruebas de comprobación del funcionamiento del sistema en una forma bastante básica. Esto significa que el objetivo era probar, en una estructura con una vibración controlada y conocida, que los datos registrados y guardados por el sistema se correspondían a los esperados. Los resultados obtenidos, además de exitosos, puesto que se han registrado correctamente las excitaciones inducidas a la estructura, han proporcionado algunas pinceladas para mejorar el sistema. Los siguientes pasos a realizar involucrarán el uso de sincronización inalámbrica entre varias unidades del sistema con vistas a ser capaces de monitorizar grandes estructuras con un mínimo despliegue de cables.
Captura del montaje realizado sobre una viga.Datos recogidos por el sistema.
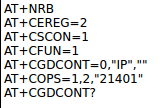
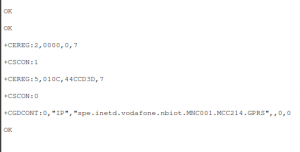
Ya estamos trabajando con los módulos NB-IoT del proyecto Sensoriza y hemos conseguido conectarnos con la red de Vodafone desde el laboratorio.
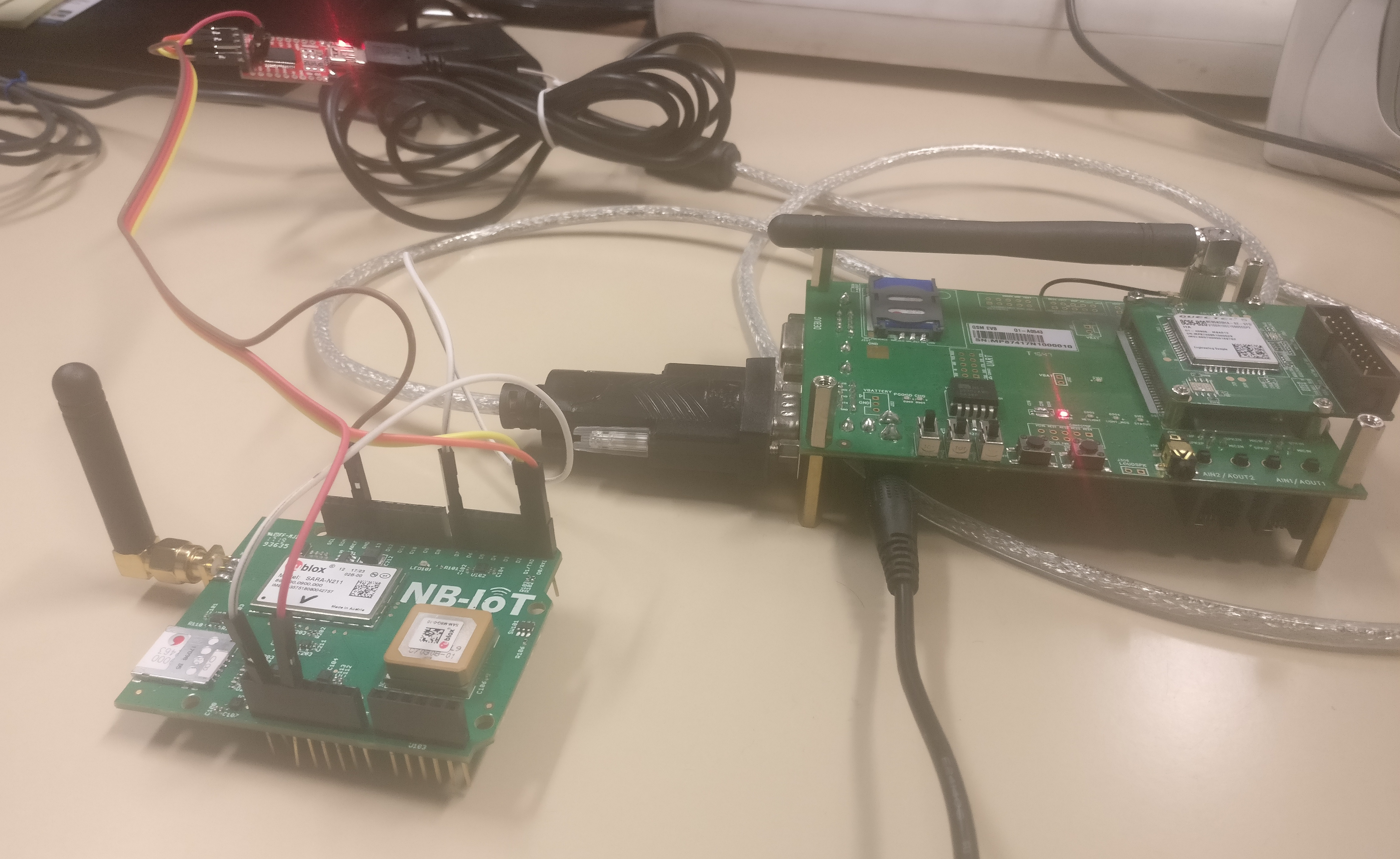
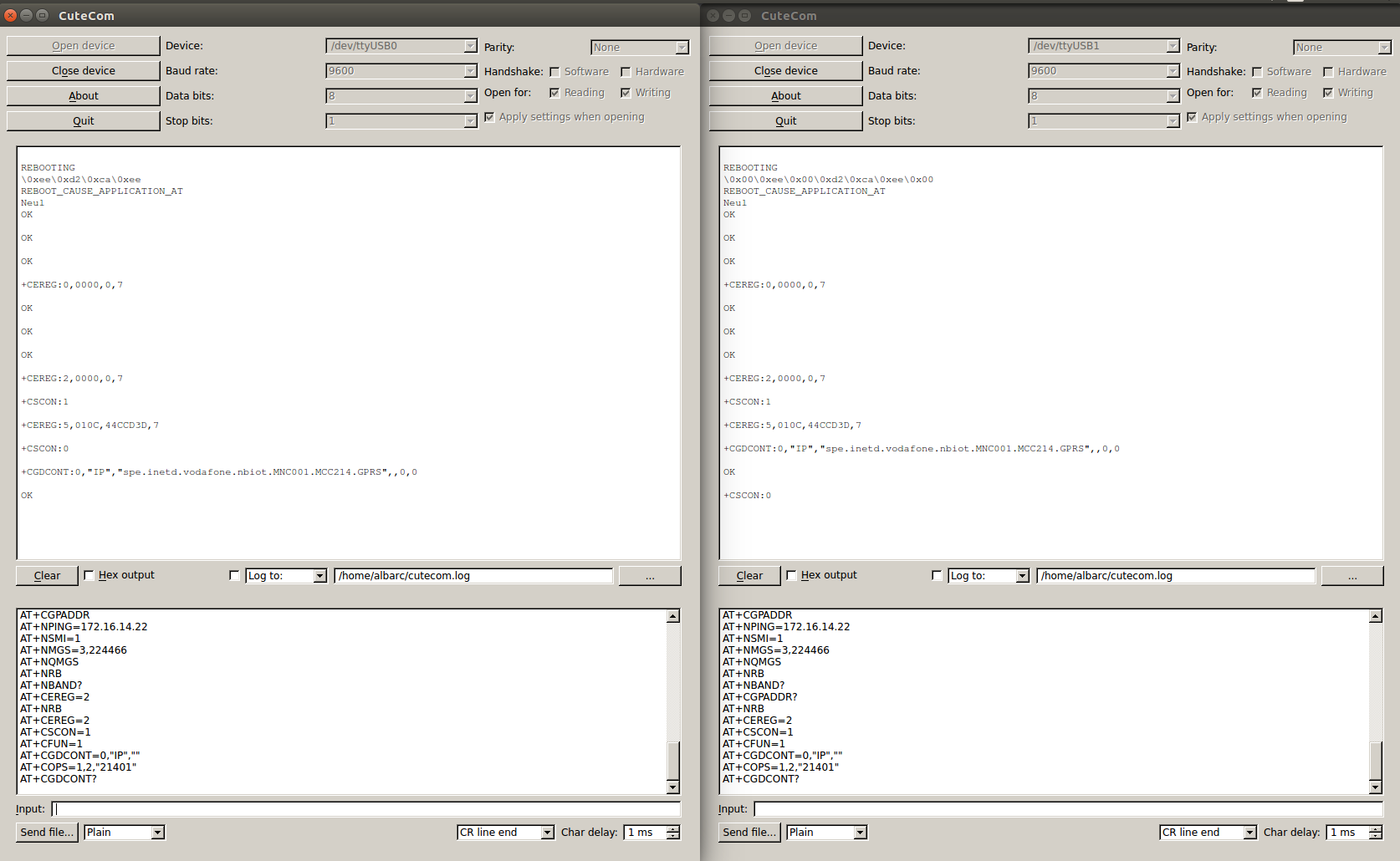
Hemos hecho pruebas con dos plataformas hardware. En primer lugar usamos una shield NB-IoT para Arduino de la empresa SODAQ que incorpora el módulo SARA-N211 de u-blox. Nosotros la utilizamos de forma autónoma, alimentándola directamente sin utilizar ningún Arduino. Por otro lado tenemos el módulo BC95 de Quectel montado en su propia Evaluation Board. Ambos se conectan mediante un puerto serie USB a un ordenador, ya que los módulos se controlan mediante comandos AT. El escenario de pruebas es el siguiente, con el módulo de u-blox más pequeño a la izquierda y el de Quectel a la derecha.
Tras estudiar y entender la sucesión de comandos necesaria, y con la información que nos ha facilitado Vodafone, hemos conseguido conectar ambos dispositivos a la red de forma correcta.
Además de este primer objetivo, el proyecto persigue otra importante meta, el desarrollo de una red de sensores inalámbrica para monitorizar las condiciones de vida de personas con necesidades especiales, como ancianos o personas con minusvalía.
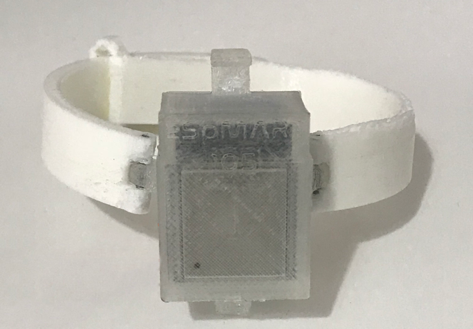
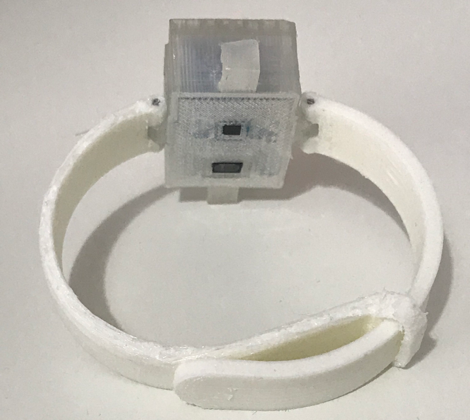
Es dentro de este segundo objetivo donde nace nuestro wearable: eSpMART105.
El dispositivo que hemos desarrollado es una pulsera, capaz de medir la temperatura (ya sea ambiente o corporal del paciente), medir su ritmo cardíaco, su saturación de oxígeno y monitorizar su actividad diaria, detectando posibles caídas y avisando al personal que se encuentre a cargo de dicho paciente.
Pulsera eSpMART105
Gracias a una aplicación móvil para Android, también desarrollada por nosotros, el personal sanitario puede en todo momento consultar el estado del paciente, ver un registro de sus últimas medidas, así como cambiar la periodicidad de las mismas, consultar su historial clínico, recibir alertas sobre posibles valores anómalos en el paciente o caídas y administrar, sencillamente desde el móvil, a todos los pacientes de la residencia.
Una de las vistas de la aplicación
La comunicación entre la pulsera y el móvil se realiza mediante Bluetooth Low Energy, el más actual de los estándares Bluetooth disponibles.
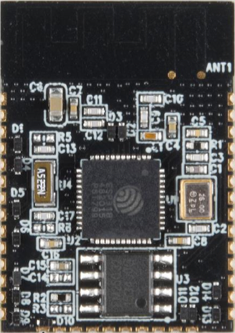
Además, en caso de que se detecte un evento de gran peligrosidad como una caída o un pulso anormalmente alto, la pulsera es capaz de realizar una búsqueda exhaustiva de puntos de acceso Wi-Fi almacenados en su base de datos y establecer conexión con ellos, enviando el aviso. Esto hace a nuestra solución capaz de comunicarse con dos de las tecnologías inalámbricas más ampliamente usadas en el mercado actual. Todo ello con un consumo muy bajo, que permite a la pulsera (dependiendo de los intervalos de medición de parámetros del paciente) una vida de hasta dos semanas. Para el desarrollo de esta pulsera nos hemos basado en el ESP32, un dispositivo genial para desarrollo debido a su integración en un reducido tamaño de Wi-Fi y Bluetooth, así como numerosos GPIO’s, I2C, SPI, UART, control para pantallas táctiles y mucho más.
ESP32
La caja de la pulsera, así como su correa es también diseño nuestro. Ha sido impreso en material 3D, recurriendo a filamento rígido transparente para la caja, pues la rigidez de este material aporta robustez mecánica al diseño, y material blanco flexible para la correa, compuesto que la hace más cómoda de llevar.
Paralelo a este desarrollo hemos recurrido a relojes de la marca Pebble, que permiten programar aplicaciones en C e incorporan también comunicación Bluetooth y sensor de ritmo cardíaco. Gracias a este reloj podemos obtener datos nuevos del paciente como su nivel de actividad, sus pasos diarios y una segunda medición de ritmo cardíaco, que aporta robustez a la medida de nuestro sistema. Los datos que recoge esta otra pulsera son también enviados a la misma aplicación de Android, quedando por tanto, toda la información del paciente centralizada.
Desde el proyecto Simbiosys, buscamos nuevas formas de detección de fatiga. Puesto que el sistema está destinado a ser usado en un simulador para conductores de vehículos, se busca que sea lo menos intrusivo posible, para facilitar el movimiento y comodidad del conductor.
Con este fin se está desarrollando un sistema multisensor con una parte importante de investigación como es la detección de distintos estados de fatiga mediante la actividad cerebral del conductor.
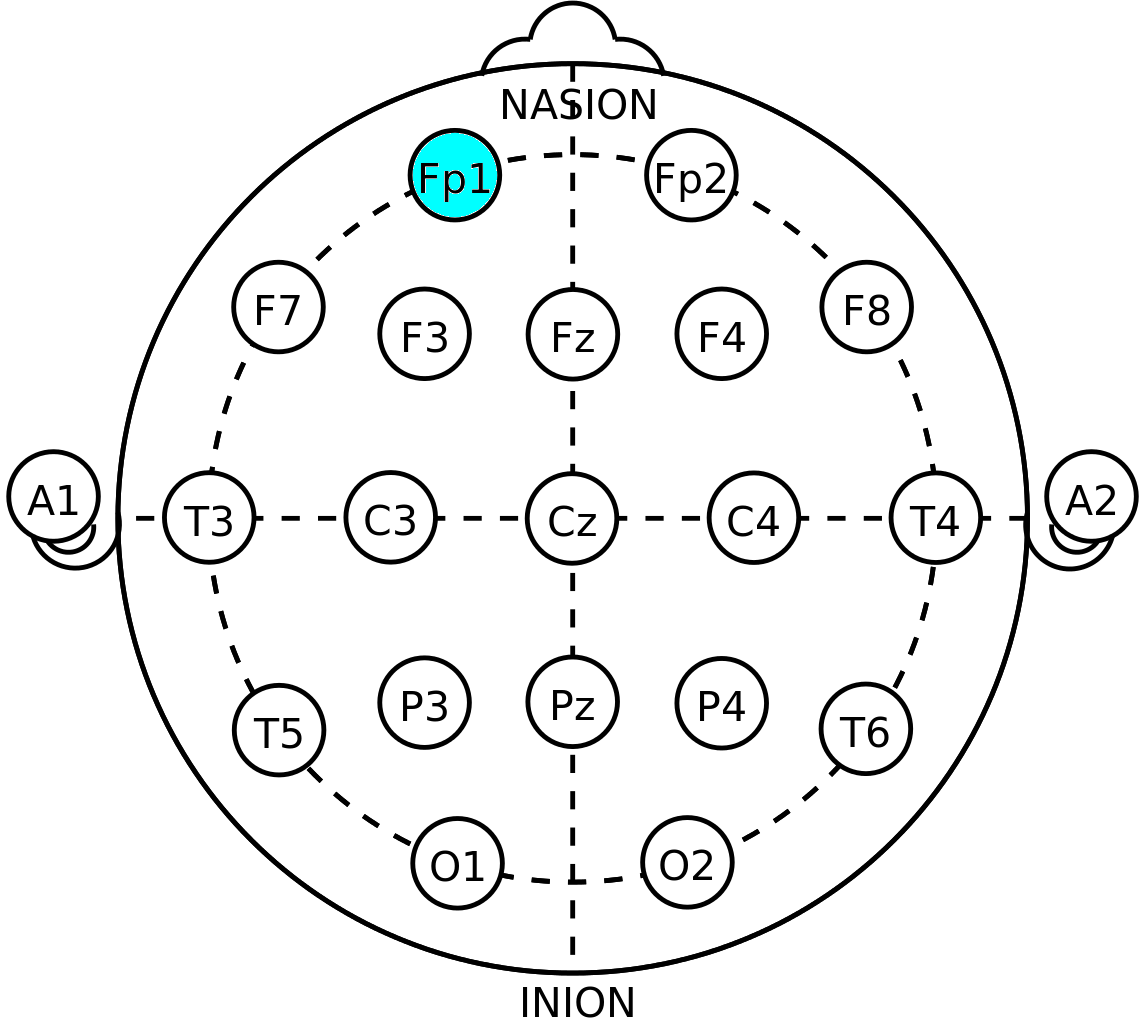
Para la obtención del electroencefalograma (EEG) se eligió un casco con un único electrodo, ya que los EEG convencionales presentan más de veinte electrodos, lo cual sería muy intrusivo para el conductor.
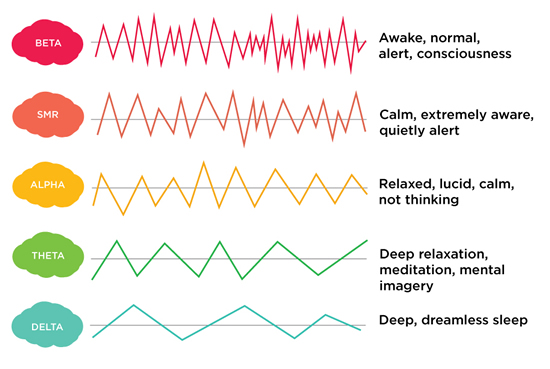
Tras la obtención de la señal en bruto del cerebro, el sistema se basa en la detección de la cantidad de energía que existe en las diferentes bandas del cerebro. En este caso las bandas de interés serán la banda alpha, betha y tetha, todas ellas relacionadas con estados de cansancio, fatiga o sueño.
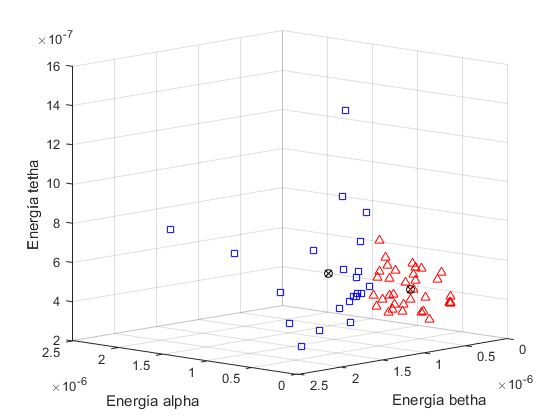
El sistema consta de dos partes diferenciadas, basadas en machine learning. En la primera parte se obtiene las características – la energía de cada banda- del sujeto en estado de consciencia (no fatigado) para formar dos clústeres.
El objetivo es generar dos esferas que engloben todas las características en este estado, de tal forma que, si en la segunda parte del algoritmo se obtiene alguna característica que no pertenece a los clústeres, se considera una anomalía. Será la acumulación de anomalías durante un periodo de tiempo la que nos indique la presencia de fatiga en el sujeto.