
Una de las dos líneas de desarrollo dentro del proyecto Lázaro está dedicada a la detección y caracterización de barreras arquitectónicas en edificios. Para ello en el B105 hemos desarrollado una aplicación Android aprovechando la plataforma de visión artificial Google Tango.
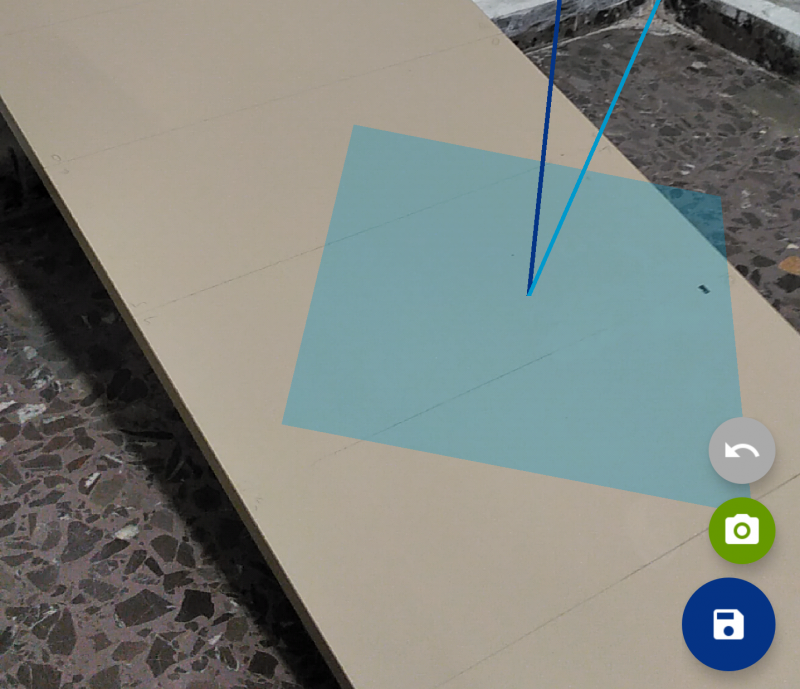
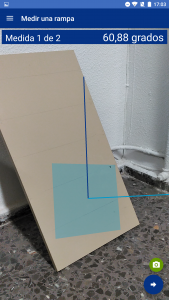
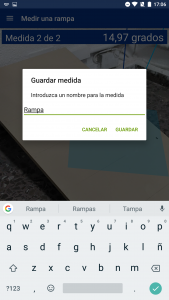
La aplicación está destinada a medir el ángulo de inclinación de las rampas de acceso para personas con movilidad reducida. Hasta ahora, los operarios que realizaban esta tarea debían efectuar medidas y cálculos a mano sobre las rampas. Con esta app la medida del ángulo consiste simplemente en un toque sobre la pantalla.
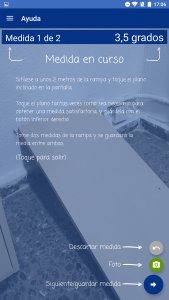
Para evitar posibles imperfecciones en la medida se le pide al usuario que realice dos mediciones de cada rampa, guardándose la media entre ambas. En la aplicación existe una pantalla de ayuda que explica el proceso al usuario.
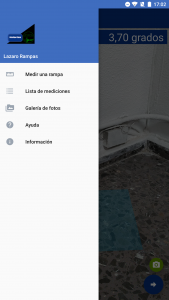
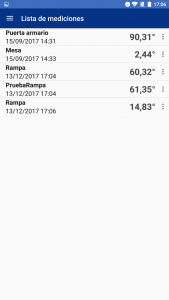
Además de esto, en la aplicación pueden consultarse todas las medidas que se han realizado anteriormente con el dispositivo y hacer capturas de pantalla de las mediciones.











{kind=link}