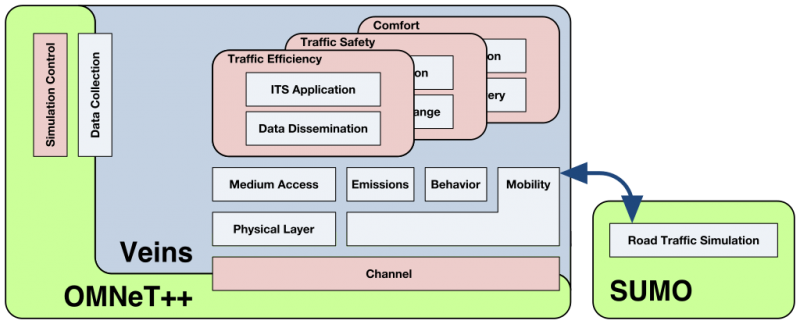
En los últimos días os hemos estado hablando de la idea de introducir redes de sensores en las redes vehiculares. Esta idea que está comenzando a ser realidad no podría llevarse a cabo sin las herramientas necesarias de diseño, implementación y tests. Una de las más prometedoras es el simulador Veins. Se trata de un entorno de test que utiliza el conocido simulador Omnet++ como base y le incluye todas las funcionalidades para crear escenarios de vehículos.
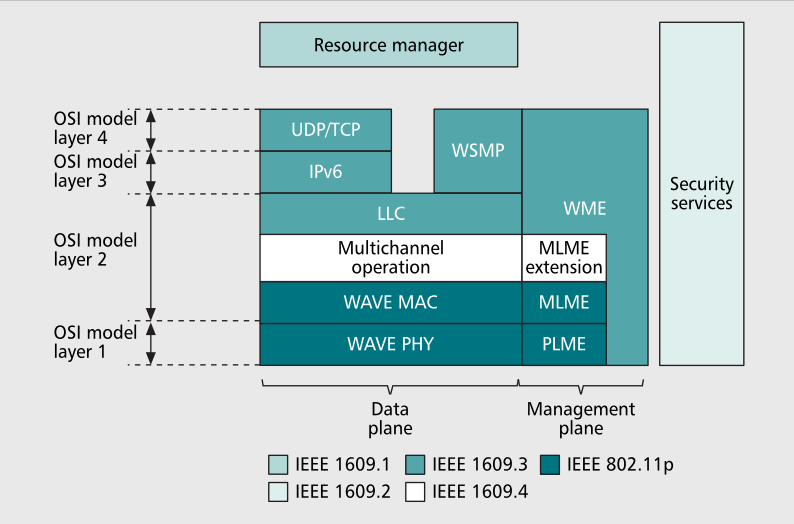
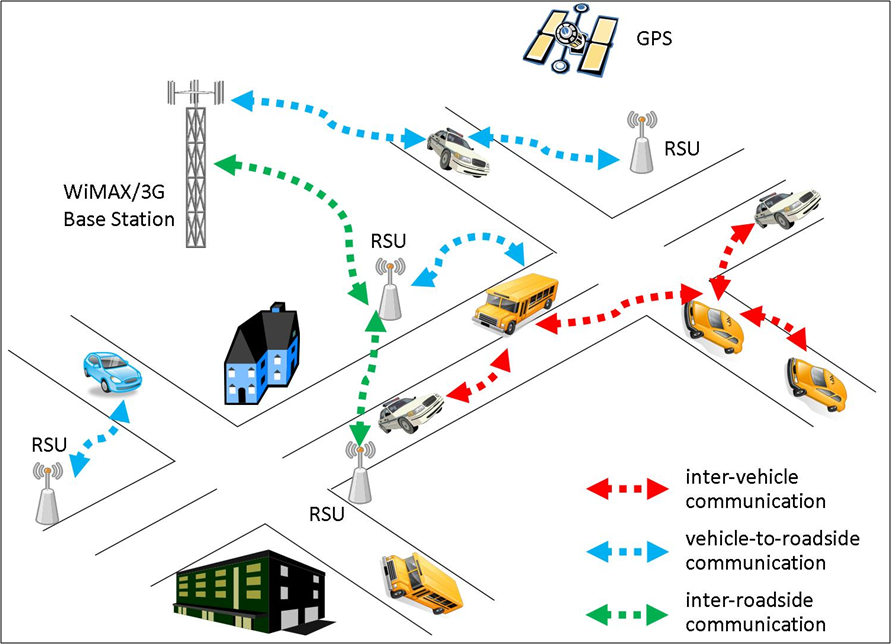
Veins cuenta con el código para crear escenarios, nodos embarcados en vehículos (OBU) y nodos en la carretera (RSU). Para ello contiene el protocolo WAVE del que ya os hemos hablado anteriormente. Veins puede ser instalado en Windows, Mac OS y Linux. Nosotros lo hemos probado en Linux y el proceso de instalación, aunque un poco largo, es sencillo siguiendo su tutorial. Para su funcionamiento se apoya en otra herramienta llamada SUMO, que es un simulador de tráfico. Con él podremos crear rutas de tráfico, distintos caminos, mapas, y hasta tipos de vehículos.
Una vez tengamos Veins, SUMO y Omnet++ instalados podremos empezar a ver los tutoriales que el propio programa integra. A partir de ahí el desarrollador es que debe coemnzar a generar sus propios módulos y código.