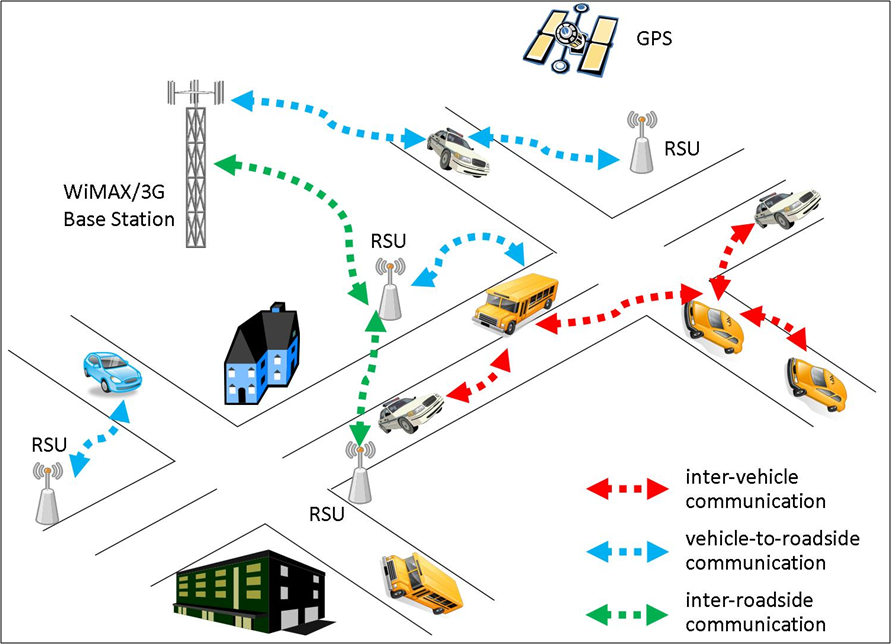
Como comentamos en el anterior artículo de esta serie, los dispositivos básicos que forman una red de vehículos son las Roadside Units (RSUs) y las On Board Units (OBUs). Estos dispositivos cuentan con los protocolos de comunicaciones programados para poder crear una red. Actualemente no existe una gran variedad de fabricantes o modelos. Entre los fabricantes de RSUs encontramos algunas empresas como Arada, NXP o Cohda. Debido a la escasez de empresas fabricantes, a los pocos proyectos pilotos y a lo cerrado de los protocolos, el precio de estas unidades se ha disparado. Lo mismo ocurre con las unidades OBU. De estas últimas ha sido aun más difícil encontrar información debido a la opacidad de las empresas del sector automovilístico. Sin embargo, hace poco salió a la luz una nuava tarjte apara estas OBU de la marca Nvidia, la Drive PX Pegasus, de la que podemos ver sus características.
El alto coste de estos dispositivos es uno de los mayores problemas para el desarrollo a gran escala de redes vehiculares. Sin embargo, frente a esta limitación encontramos el primer nicho en el que las WSNs podrían tener cabida en estas redes de vehículos.
Todos estos dispositivos necesitan un protocolo de comunicaciones para poder ejecutar sus funciones. Dentro de todos los protocolos que se llevan implementando desde hace más de 15 años, el protocolo WAVE, wireless access in vehicular environments, es el que se está imponiendo. En realidad el protocolo WAVE, está formado por el estándar 802.11p, que define las capas física y de acceso al medio, y el protocolo 1609 que define las capas superiores. Como resumen simplificado el protocolo WAVE, pensado específicamente para las redes vehiculares, afronta varias características limitantes como son:
- Coberturas de hasta 1000 metros
- La alta velocidad de los vehículos
- Entornos muticamino
- Múltiples redes solapadas en el espacio con una gran calidad de servicio
- La naturaleza de las aplicaciones
- Un tipo de mensaje específico
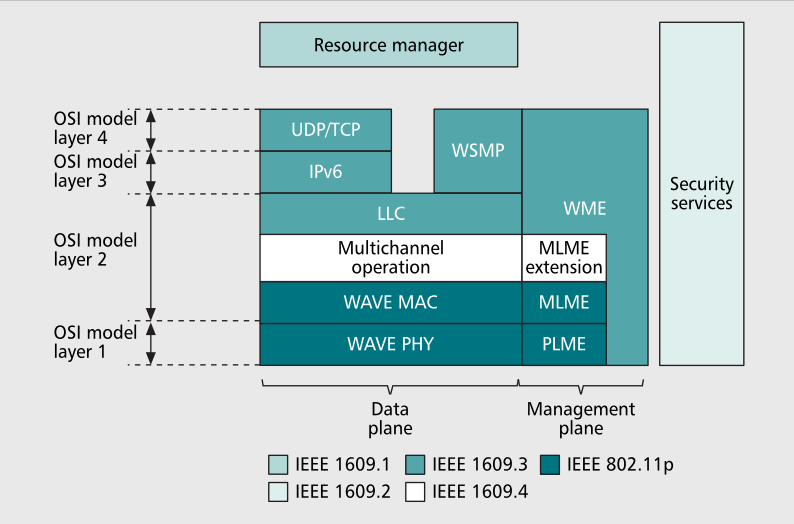
Con estos requisitos, se ha dotado al protocolo WAVE de las siguientes características:
- Canales de 10 MHz, que pueden transmitir la mitad de información que WiFi
- Hay 6 canales de servicios (SCH) y uno más de control (CCH)
- Modo único Ad Hoc
- Direcciones MAC aleatrorias
- Gran precisión de la señal RSSI
- Modulación 16 QAM para entornos de movilidad
- Control de prioridades
- Control de potencia
Con los dispositivos previamente mostrados y con el protocolo WAVE se pueden conseguir implementar VANETs. Sim embargo, como hemos comentado su coste ha limitado el desarrollo de más prototipos. Pero no solo el coste es la limitación. Otros problemas, que veremos en el siguiente artículo, deben ser resueltos para que las VANETs sean realidad.