Los autores de este ensayo, expertos y profesionales del mundo de la enseñanza y de la tecnología, tanto en los ámbitos civil y militar, realizan una aproximación práctica de la implantación de nuevas tecnologías y metodologías en el desarrollo de procesos formativos. Al sumar conocimientos de ambas áreas, el producto resultante es un trabajo funcional para afrontar los cambios exigibles por el mundo actual en general, y en la esfera militar en particular.
El fondo de la cuestión es poner de manifiesto la necesidad de afrontar y acometer procesos de revisión de las áreas formativas gracias a la mejora que se obtiene de las nuevas tecnologías y nuevas sistemáticas. La educación es un área clave en la revolución digital, y es la enseñanza candidata a evolucionar para hacerse útil, directa, personal y eficaz.
El trabajo es un recorrido global, en el que en el primer capítulo se plantea un diferente contexto para la formación, realzando el momento de cambio social, y donde se remarcan los cinco pilares sobre los que se sustenta la nueva forma de enseñar: deslocalización, atemporalidad, personalización, bidireccionalidad y calidad continua. El segundo capítulo, afronta un recorrido por las metodologías de enseñanza, señalando las características de cada una y sus momentos de aplicación más oportunos. El tercero, aborda el estudio de una serie de herramientas y tecnologías que actualmente pueden utilizarse en el sector de la enseñanza y su adecuación a las metodologías formativas resaltadas en el apartado anterior, para finalmente, en el último y cuarto capítulo, desarrollar el caso práctico de implementación de sistemáticas y herramientas en una asignatura concreta del Curso de Estado Mayor del Fuerzas Armadas (CEMFAS).
Nuestro compañero Octavio Nieto-Taladriz García ha sido el Presidente del grupo de trabajo que ha realizado este ensayo y cuyos datos son los siguientes:
ISBN: 978-84-9091-612-4
NIPO: 083-21-249-0
Fecha de publicación: 24/3/2022
Año de edición: 2021
Autor: Centro Superior de Estudios de la Defensa
Editor: Ministerio de Defensa. Secretaría General Técnica.
Número de páginas: 106
Disponible en su versión digital en el siguiente enlace.
B105 Electronic Systems Lab, of the Electronic Engineering Department, developed in the past several nodes called ‘Yetimote’, which work on the ISM frequencies of 433 MHz, 868 MHz and 2.4 GHz. During the last years, one of the main target’s laboratory has been the study of wireless networks over the human body (WBAN), composed by sensor nodes that are placed on different points of such human body to collect data for several purposes, usually for medical applications. However, the Yetimote node is addressed to use traditional wireless networks (WSN), due to its size and specific physical format.
The objective of this project was to adapt this node for evaluating and developing WBAN networks. To achieve this goal, one of the main printed circuit boards of the Yetimote node, called Cerberus, which is in fact the part in charge of carrying the wireless communications out, has been modified to make it more wearable.
On the other hand, the context of the project has been analyzed in more detail, describing WBAN networks in depth, the most common characteristics of these networks and their different usages. After a detailed analysis of the requirements to be fulfilled by the new board to be designed in the context of this work, a very deep study has been carried out about possible antennas to be used in this new solution. Finally, the specific choice of the antenna to be used in this work for each band was determined based on its characteristics. One of the electronic components which humans are more accustomed to is a wristwatch, so the PCB has been designed to be integrated inside an enclosure with this shape.
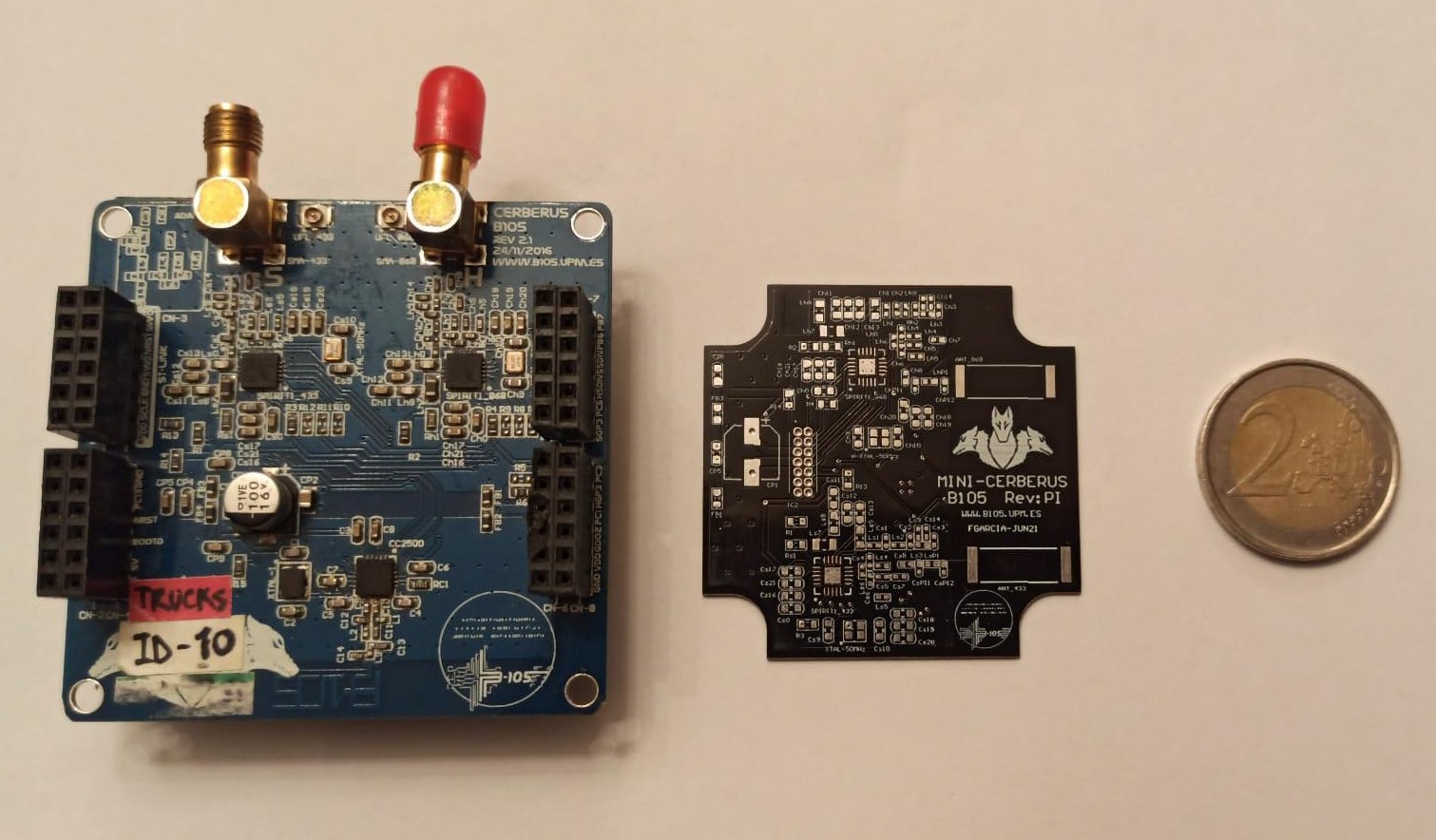
The next step was the electronic design and the PCB implementation of the new board called ‘Mini-Cerberus’, which has been designed using the Altium Designer tool. This new PCB will be connected to the rest of the Yetimote node through the board ‘Auxiliar’ which will be connected to the ‘Mini-Cerberus’ PCB through a flat cable. In addition, the ‘Mini-Cerberus’ board has several versions, one of them has a Pi-Network for each frequency band. Finally, the components were assembled using an industrial furnace and by manual welding. In the figure below, the previous ‘Cerberus’ PCB is shown in front of the new ‘Mini Cerberus’ prototype.
Additionally, some trials have been carried out in real environments to verify the correct operation of the developed design. Several tests have been performed in different real-world scenarios to study the performance of the new Mini-Cerberus board for different frequencies and transmission power values, and these results have been compared with those obtained for the original Cerberus board, which was used as reference or baseline.
In conclusion, it can be affirmed that the new ‘Mini-Cerberus’ PCB has a better performance in WBAN scenarios in the 433 MHz frequency band, while the 2,4 GHz frequency band has the worst performance of those studied. In relation to the Cerberus board, the new prototype has a lower performance compared to the original model, but this is an expected result due to the modifications made for its miniaturization
Throughout the years, music has been and continues to be one of the main forms of artistic and cultural expression of people. It could be defined as the art of combining rhythm, melody and harmony in a pleasant and enjoyable way to the listener. Rhythm is the element that relates music to time for get a 1000 dollar loan today. The interpreter and/or composer can manage it at will, to transmit different emotions depending on the chosen pulse rate, the duration of the notes used, and the accents that some notes receive along the measure. To ensure a good melody and harmony we need to use a tuner. Taking into account the notes that belong to the key, the tuner ensures that this set of sounds are appropriate to form the melody. That is to say, that the sound produced when playing a key or a string corresponds to the one established in that position. The same thing happens with harmony. Harmony is in charge of combining two musical notes and making them sound in consonance, as in a chord.
The aim of a performer and/or composer is to convey emotions and feelings. To do this he employs different rhythmic techniques, chord progressions and scales. To convey a happy feeling he will use major chords and to convey a sad one he will use minor chords. Augmented chords are used to give suspense and diminished chords to predict an outcome.
Until the invention of the tape recorder and the player, people’s musical reach was very limited. They could only listen to music produced on the spot, and its quality depended on the skill of the closest performers. The most skilled musicians left written musical scores to preserve their music so that subsequent musicians could perform it. With the invention of the tape recorder and the player, a revolution of such magnitude took place that, little by little, it was possible to bring music to any place in the world to be reproduced at any time.
The facts described above and my interest as a musician, have led me to to develop this project. The intention was to provide a device that brings together the 3 main functions that a musician needs to practice and improve their skills. The functions I wanted to include in the device are: a metronome, a tuner and a recorder. To bring it to fruition, I took a previous project from 2018 that included those functions and used a Raspberry Pi.
Raspberry Pi + PiTFT touchscreen
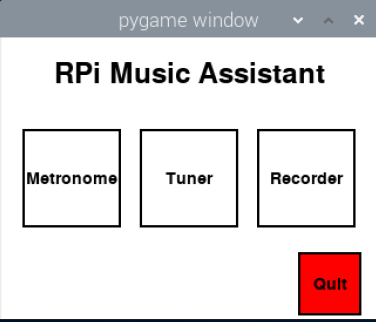
A Raspberry Pi is a microcontroller-based platform capable of providing the basic functions of a computer, but at a much smaller price and size. For this project, the Raspberry Pi can be controlled, besides a mouse and a screen, in a tactile way with a PiTFT screen connected by the GPIO pins. Also, the choosen Raspberry Pi 4 Model B incorporates inputs to connect a microphone (USB) and headphones to carry out all the required functionalities. The programming language used has been Python, as it contains an endless number of libraries to carry out the project. The different menu screens and buttons were created with the PyGame library.
The initial view corresponds to the following image:
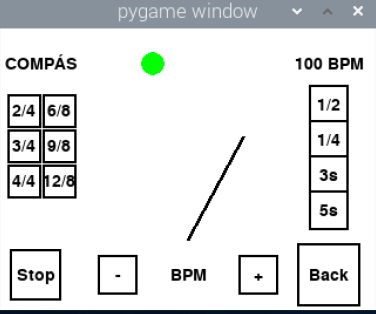
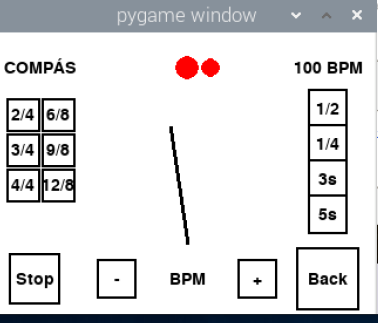
Initially, the metronome displayed an inverted pendulum and a flashing circle. Later on, I incorporated functions to mark the different types of time signature and the different ways of dividing a beat.
Before I made any changes, the tuner had two main functions, the first one was to emit the note with the desired frequency. The second one incorporated a listening mode in which the program detected the note emitted, as well as its accidentals and frequency.
I added a third functionality to it that serves as an ear training tool for the musician, as well as, facilitating the composition of chords. It shows the notes that make up the four types of triads.
Major Triad: 1, 3, 5
Minor Triad: 1, minor3, (perfect) 5
Diminished Triad: 1, minor3, diminished5
Augmented Triad: 1, 3, augmented5
The recorder incorporates a microphone to record the musician’s performances and displays a screen with a list of recordings and/or imported songs. It contains buttons for playback and scrolling between screens.
The results have shown that the Music Assistant has great potential. It is an open source device in constant development, which differentiates it from other devices at the moment.With it, musicians can have fun practicing at a reduced price. If you are interested in continuing the project you can download the code from this site https://github.com/Minervapla1/Musical-Asistant.git .
On November 12th, our lab member Roberto Rodriguez Zurrunero defended his PhD Thesis entitled “Dynamic Management in Operating Systems to Improve Energy Efficiency of Resource-Constrained and Wireless Devices”. This work was carried out at B105 Electronic Systems Lab under the direction of Professor Alvaro Araujo.
The thesis defense took place at the ETSI Telecomunicación in Madrid, and the work was evaluated positively earning the highest possible grade, along with the “cum laude” and international mentions.The main contributions of this PhD thesis are the following:
A proof of concept was designed and implemented to introduce a game theory algorithm in the OS scheduler meant to extend devices’ batteries lifetime.
An OS for resource-constrained devices, YetiOS, was proposed, whose main novel contribution is an adaptive engine that enhances OS’s dynamic capabilities.
A study of the cross-influences between the processing and communication tasks in an OS for resource-constrained devices was developed.
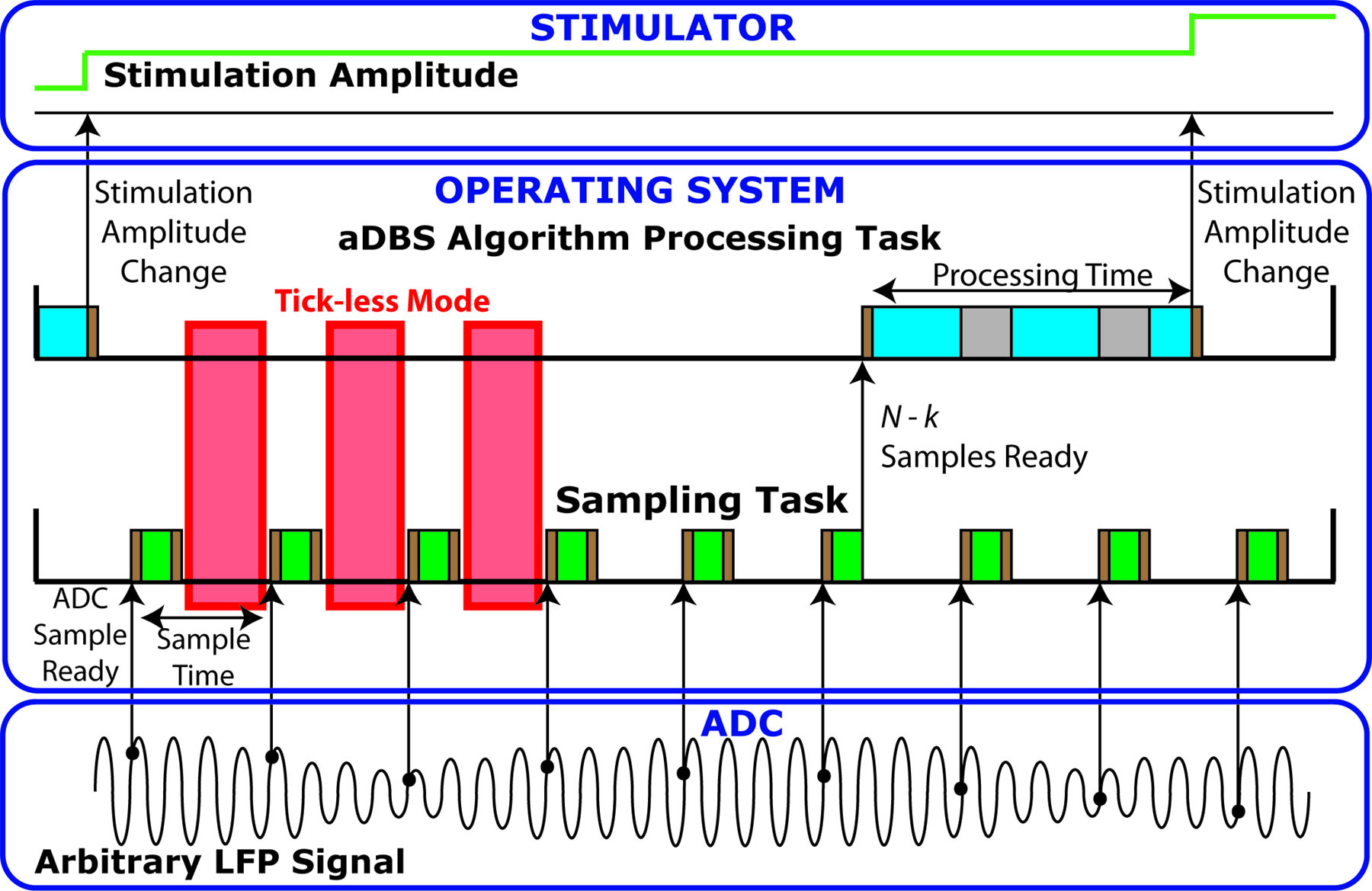
The use of an OS is introduced for a specific medical application, deep brain stimulation (DBS) devices. Four methods were proposed to reduce the power consumption overhead when introducing an OS in such devices.
It was demonstrated that in most recent resource-constrained devices with enhanced low power modes (which are used by certain OSes’ power management modules), a lower clock frequency does not necessarily imply a lower power consumption (contrary to what was stated to date in the literature). Therefore, a novel adaptive frequency-scaling algorithm (based on a well-known machine learning algorithm) was proposed to dynamically change the clock frequency to the best value in terms of power consumption.
And, finally, this is the list of peer-reviewed journal and conference publications that were obtained during the course of this PhD:
International journal articles:
R. Rodriguez-Zurrunero and A. Araujo, “Adaptive frequency scaling strategy to improve energy efficiency in a tick-less Operating System for resource-constrained embedded devices,” Future Generation Computer Systems, vol. 124, pp. 230-242, 2021.
R. Rodriguez-Zurrunero, A. Araujo, and M. M. Lowery, “Methods for Lowering the Power Consumption of OS-Based Adaptive Deep Brain Stimulation Controllers,” Sensors, vol. 21, iss. 7, 2021.
R. Rodriguez-Zurrunero, R. Utrilla, A. Rozas, and A. Araujo, “Process Management in IoT Operating Systems: Cross-Influence between Processing and Communication Tasks in End-Devices,” Sensors, vol. 19, iss. 4, 2019.
R. Pita, R. Utrilla, R. Rodriguez-Zurrunero, and A. Araujo, “Experimental Evaluation of an RSSI-Based Localization Algorithm on IoT End-Devices,” Sensors, vol. 19, iss. 18, 2019.
R. Utrilla, R. Rodriguez-Zurrunero, J. Martin, A. Rozas, and A. Araujo, “MIGOU: A Low-Power Experimental Platform with Programmable Logic Resources and Software-Defined Radio Capabilities,” Sensors, vol. 19, iss. 22, 2019.
R. Rodriguez-Zurrunero, R. Utrilla, E. Romero, and A. Araujo, “An Adaptive Scheduler for Real-Time Operating Systems to Extend WSN Nodes Lifetime,” Wireless Communications and Mobile Computing, vol. 2018, 2018.
G. Mujica, R. Rodriguez-Zurrunero, M. Wilby, J. Portilla, A. B. R. González, A. Araujo, T. Riesgo, and J. J. V. Díaz, “Edge and Fog Computing Platform for Data Fusion of Complex Heterogeneous Sensors,” Sensors, vol. 18, iss. 11, 2018.
International conference proceedings:
R. Rodriguez-Zurrunero, F. Tirado-Andres, and A. Araujo, “YetiOS: an Adaptive Operating System for Wireless Sensor Networks,” in 2018 IEEE 43rd Conference on Local Computer Networks Workshops (LCN Workshops), 2018, pp. 16-22.
A couple weeks ago, our lab member Alba Rozas Cid defended her PhD thesis entitled “Cross-layer Strategies for Improving the Quality of Service of Wireless Sensor Networks”. This PhD work was carried out at B105 Electronic Systems Lab under the direction of Professor Alvaro Araujo.
The thesis defense took place at the ETSI Telecomunicación in Madrid, and three members of the examination panel were physically present. However, due to travel restrictions, the other two members attended the act online from France and the USA, respectively. The work was evaluated positively earning the highest possible grade, along with the “cum laude” and international mentions. Learn and see how fire barriers’ role in preserving the environment here and how you can protect yourself in advance.
The following are some links where parts of this PhD research are explained or published:
And, finally, this is the list of peer-reviewed journal and conference publications that were obtained during the course of this PhD:
International journal articles:
A. Rozas, A. Araujo, and J. M. Rabaey, “Analyzing the Performance of WBAN Links during Physical Activity Using Real Multi-Band Sensor Nodes,” Applied Sciences, vol. 11, no. 7, p. 2920, Mar. 2021, doi: 10.3390/app11072920.
A. Rozas and A. Araujo, “An Application-Aware Clustering Protocol for Wireless Sensor Networks to Provide QoS Management,” Journal of Sensors, vol. 2019, pp. 1–11, Sep. 2019, doi: 10.1155/2019/8569326.
R. Utrilla, R. Rodriguez-Zurrunero, J. Martin, A. Rozas, and A. Araujo, “MIGOU: A Low-Power Experimental Platform with Programmable Logic Resources and Software-Defined Radio Capabilities,” Sensors, vol. 19, no. 22, Nov. 2019, doi: 10.3390/s19224983.
F. Tirado-Andrés, A. Rozas, and A. Araujo, “A Methodology for Choosing Time Synchronization Strategies for Wireless IoT Networks,” Sensors, vol. 19, no. 16, Aug. 2019, doi: 10.3390/s19163476.
R. Rodriguez-Zurrunero, R. Utrilla, A. Rozas, and A. Araujo, “Process Management in IoT Operating Systems: Cross-Influence between Processing and Communication Tasks in End-Devices,” Sensors, vol. 19, no. 4, Feb. 2019, doi: 10.3390/s19040805.
E. Romero, J. Blesa, A. Rozas, and A. Araujo, “Energy Efficiency Strategy in D2D Cognitive Networks Using Channel Selection Based on Game Theory and Collaboration,” International Journal of Distributed Sensor Networks, vol. 12, no. 8, Aug. 2016, doi: 10.1177/155014772834652.
J. Martin, A. Rozas, and A. Araujo, “A WSN-Based Intrusion Alarm System to Improve Safety in Road Work Zones,” Journal of Sensors, vol. 2016, pp. 1–8, Jun. 2016, doi: 10.1155/2016/7048141.
A. Molina-Pico, D. Cuesta-Frau, A. Araujo, J. Alejandre, and A. Rozas, “Forest Monitoring and Wildland Early Fire Detection by a Hierarchical Wireless Sensor Network,” Journal of Sensors, vol. 2016, pp. 1–8, Feb. 2016, doi: 10.1155/2016/8325845.
J. Blesa, E. Romero, A. Rozas, and A. Araujo, “PUE attack detection in CWSNs using anomaly detection techniques,” EURASIP Journal on Wireless Communications and Networking, vol. 2013, no. 1, p. 215, Aug. 2013, doi: 10.1186/1687-1499-2013-215.
J. Blesa, E. Romero, A. Rozas, A. Araujo, and O. Nieto-Taladriz, “PUE Attack Detection in CWSN Using Collaboration and Learning Behavior,” International Journal of Distributed Sensor Networks, vol. 9, no. 6, Jun. 2013, doi: 10.1155/2013/815959.
International conference proceedings:
A. Rozas, J. Blesa, E. Romero, and A. Araujo, “Controlling the degradation of Wireless Sensor Networks,” in 2015 International Wireless Communications and Mobile Computing Conference (IWCMC), Aug. 2015, pp. 1217–1223, doi: 10.1109/IWCMC.2015.7289256.
R. Utrilla, A. Rozas, J. Blesa, and A. Araujo, “A Hybrid Approach to Enhance Cognitive Wireless Sensor Networks with Energy-Efficient Software-Defined Radio Capabilities,” in 2017 International Conference on Embedded Wireless Systems and Networks (EWSN), Feb. 2017, pp. 294–299. [Online]. Available: https://dl.acm.org/doi/10.5555/3108009.3108086.