The development of IoT product has generated multiple needs in the field of information and communication technologies. Among them, the challenge of creating technological products capable of functioning independently of the power grid arises, leading to a line of development in telecommunications that, instead of maximizing the transmission capabilities of a system, seeks to minimize its power consumption.
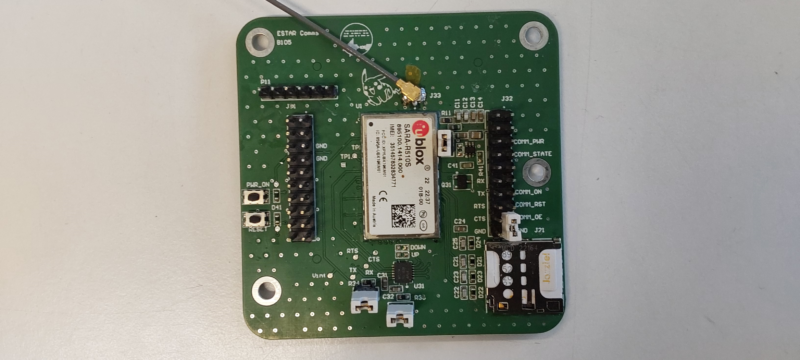
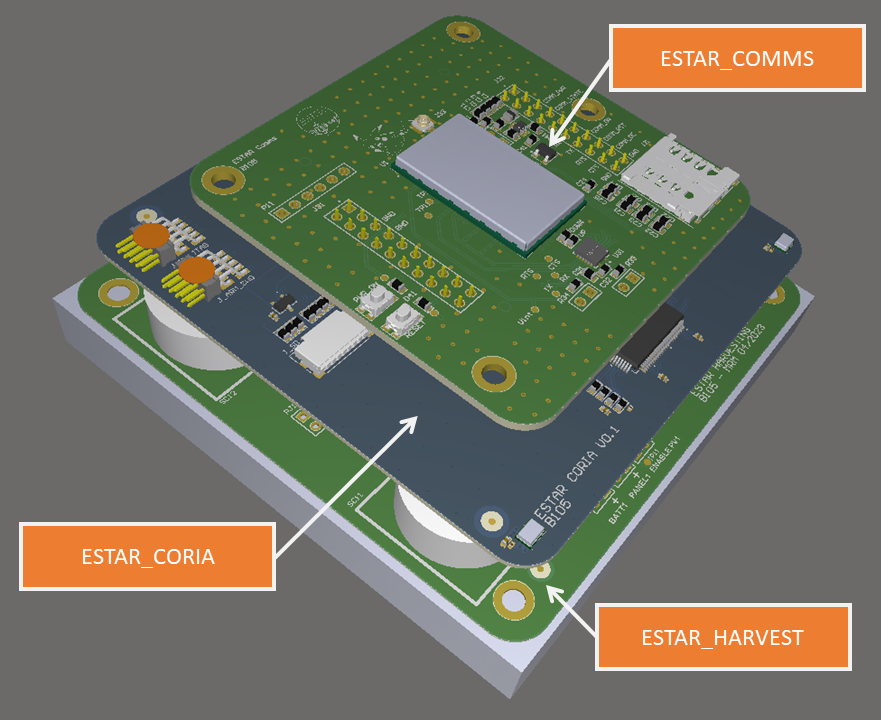
This TFG is developed within the ESTAR project, an autonomous IoT product meant for monitoring multiple environments. More specifically, it focuses on ESTAR_COMMS, the module which will be in charge of connecting the device to an external server.
In order to provide wireless communications with the lowest energy cost, an analysis of different components is given, concluding with the SARA-R510S-01B. The SARA has access to NBIoT radio technology from the LPWANs that allows for low speed, low payload, sporadic and Ultra-Low-Power transmissions.
In the thesis, the following results are presented:
A functional communication design and PCB prototype that uses the SARA-R510S-01B module, with an analysis of all design stages.
A first approach to the software design, in addition to a summary of the main AT commands that will be used to control the SARA.
The first energy consumption tests with the KeysightB2901A.
With the rise of automation in industry and the great development of AI and IoT comes Industry 5.0, in which the emphasis is on collaboration between machines and humans to improve productivity and efficiency.
With the arrival of industry 5.0 comes the need to develop new devices that can meet their needs. The HUMAIN project, on which this work is based, was born from this need.
This TFG has consisted of the research and design of a geolocation tag for industry 5.0, for which the following phases have been carried out:
First, the bases of IoT, industry 5.0 and 5G have been investigated, achieving a better understanding of the project to be carried out. Then, design decisions have been established following the concepts obtained in the research and the product specifications, and an investigation of the components available on the market has been carried out taking into account these decisions.
From this, the components have been chosen and the schematic design and layout of the board has been carried out, and, finally, the soldering of the board has been made, reaching a first prototype.
On July 13th, our colleague and lab member Santiago Real Valdés defended his PhD Thesis entitled “Network Design Strategies for Multisensory Human-Machine Interfaces of Navigation Systems for Blind and Visually Impaired People”. This work was carried out at B105 Electronic Systems Lab under the direction of Professor Alvaro Araujo.
The thesis defense took place at the ETSI Telecomunicación in Madrid. The work was evaluated positively earning the highest possible grade, along with the “cum laude” mention.
Overall, the research pursued design guidelines, tools, and methods for the development of networked navigation assistance systems for blind and visually impaired (BVI) individuals. Specifically, it resulted in the following contributions to the scientific community:
Study of the state-of-art at navigation assistance for BVI individuals. This was undertaken to re-evaluate the perspective of navigation systems for the blind and visually impaired (BVI) in a new technological-enabling context, attempting to integrate key elements of what is frequently a disaggregated multidisciplinary background.
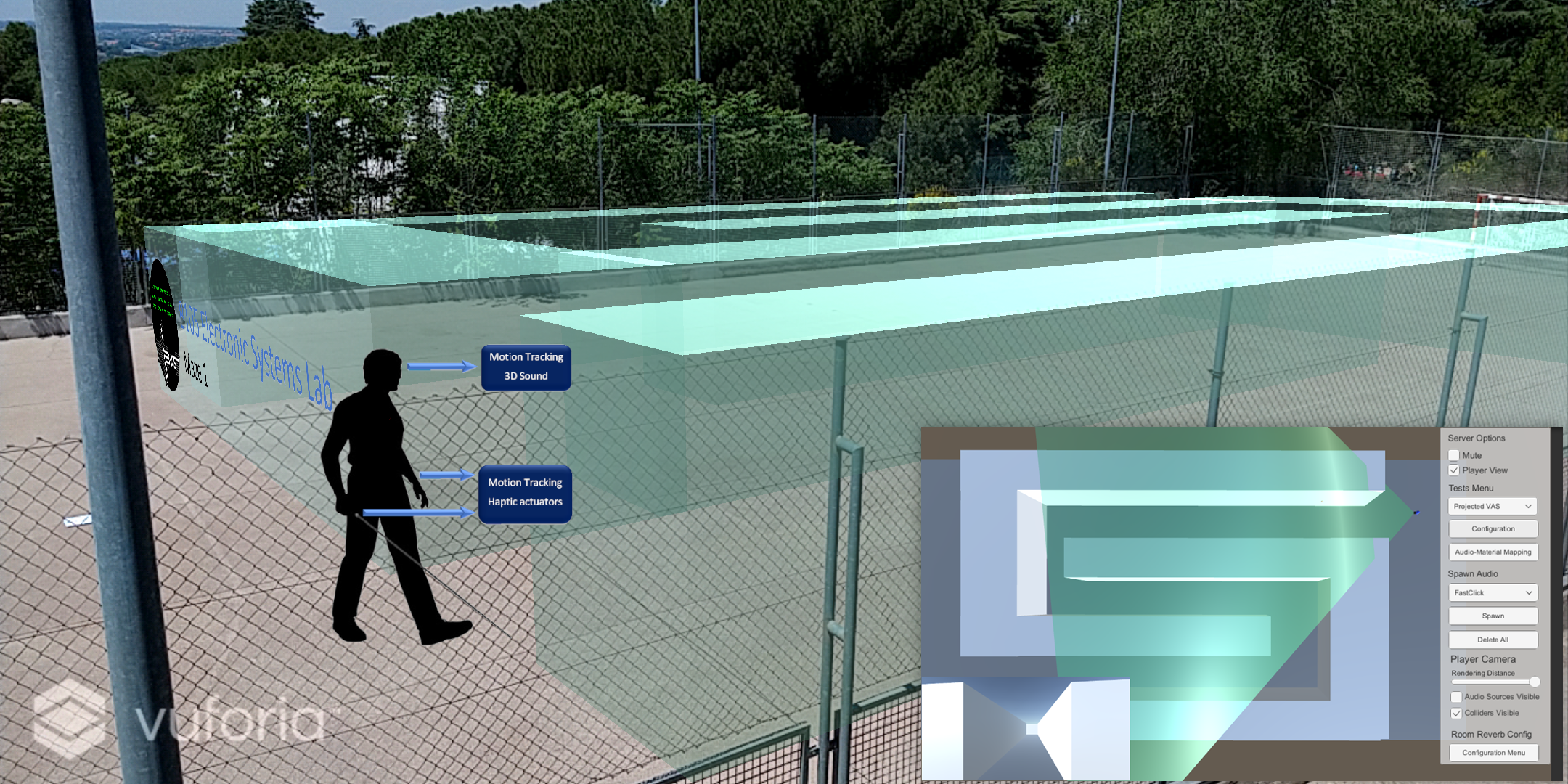
Development of the Virtually Enhanced Senses (VES) System. VES is a wireless, mixed-reality platform developed to design, emulate, implement, and test complete navigation systems.
Development of novel Sensory Substitution Devices (SSD) and methodologies to assess navigation assistance in mixed reality environments. Novel and representative SSD were implemented building on previous solutions, design guidelines and recommendations. Thereafter, new methodologies and performance markers were developed to quantify the performance of the SSD under various network architectures and operation conditions.
Novel relations between Quality-of-Experience (QoE) and Quality-of-Service (QoS) in navigation assistance for BVI individuals were found. Overall, a tradeoff was observed between the user’s spatial data acquisition and sensorimotor coupling degradation due to motion-to-photon delay.
Further information on the open-access VES system can be found at the following link. Also, the latest results were disseminated through the media:
TFM: Development of an electronic system on smart garments to aid in the diagnosis of neurodegenerative diseases
Parkinson’s disease is a neurodegenerative disorder that affects the nervous system, which mainly causes motor disorders. It affects more than 160,000 people in Spain. In addition, it is expected that due to the growing aging of the population it will become the most common serious disease by the year 2040. One of the main problems faced in this disease is the delay in its diagnosis. In addition, it is important to ensure that patients’ symptoms are properly monitored in order to correctly adjust their medication. Over the past few years, the use of wearable devices to monitor patients outside of the hospital environment has increased. Among these devices, those that use sensorized clothing, so that the sensors are integrated into the tissues, are gaining popularity and have great potential. Although these are still at an early stage of development.
In this context begins this Master’s Thesis, which is part of the research line of the B105 Electronic Systems Lab for the development of wearable devices. The main objective of the project is to design and implement an electronic system to control a set of intelligent clothes for the monitoring of different parameters, which can be connected to other wearable devices in the future.
For this purpose, a study of the symptoms of Parkinson’s disease and how it is possible to monitor them have been carried out. We have also analysed which studies have been conducted in recent years using textile sensor to diagnose or monitor this pathology. Subsequently, it has been searched which intelligent garments are being commercialized in the market. And finally, it has been established which requirements are intended to be fulfilled by the design that is going to be carried out.
Due to the initial work done, the design of the system to be implemented has been carried out.
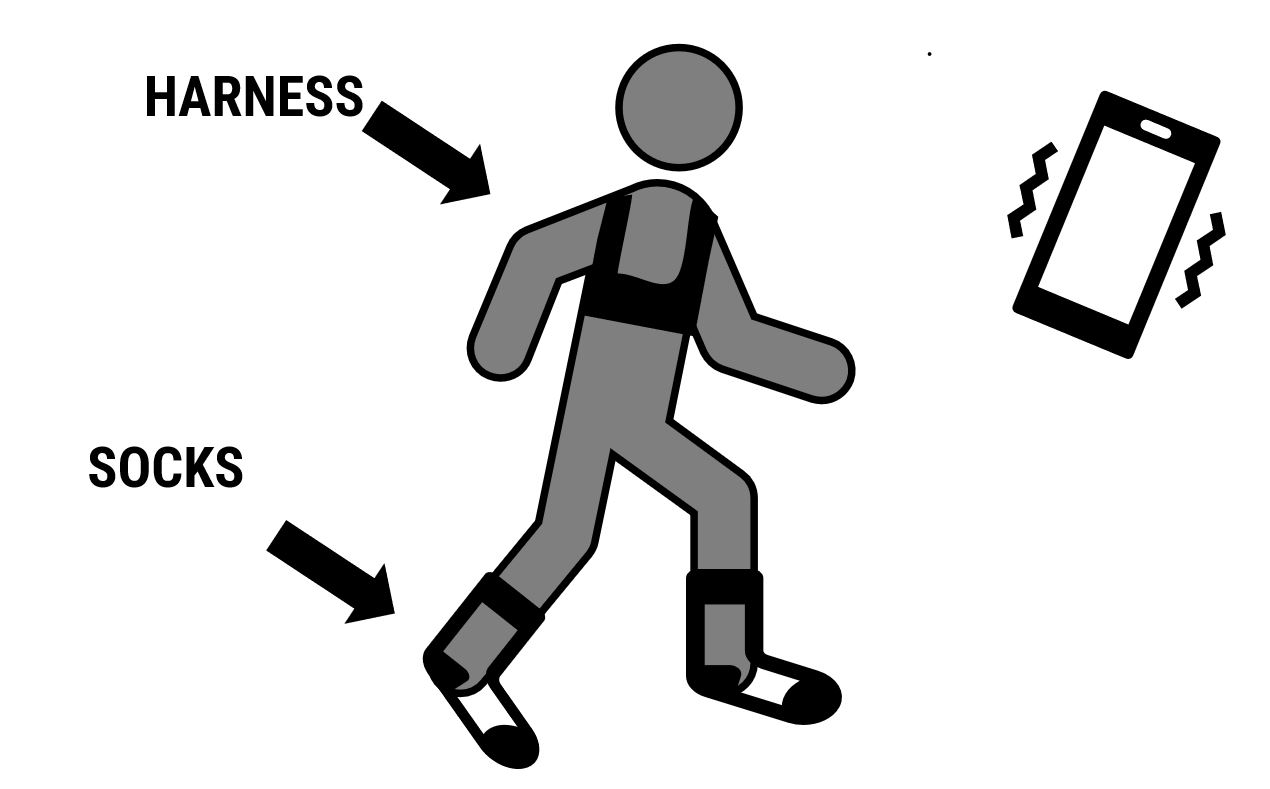
It consists of a pair of socks and a harness, which communicate through Bluetooth with a mobile phone application.
The socks incorporate 3 textile resistors in the sole of the foot, and an IMU in the ankle to monitor the patient’s gait. While the harness makes use of 3 textile electrodes, whose outputs are filtered by a circuit to obtain the ECG. It also incorporates an IMU in the central part of the chest, to monitor the user’s posture. In addition, both garments make use of a PCB in which they operate the control part and the power supply.
In the software development of the project, FreeRTOS has been used together with a state machine to control the measurements of the sensors of the garments and send the measured values via bluetooth to a mobile application.
In the hardware development, the design and implementation of the PCBs has been carried out.
Finally, we have started to perform unit tests on the development carried out, for the hardware as well as for the software, which should be finalized to verify the complete performance of the developed system.
B105 Electronic Systems Lab, of the Electronic Engineering Department, developed in the past several nodes called ‘Yetimote’, which work on the ISM frequencies of 433 MHz, 868 MHz and 2.4 GHz. During the last years, one of the main target’s laboratory has been the study of wireless networks over the human body (WBAN), composed by sensor nodes that are placed on different points of such human body to collect data for several purposes, usually for medical applications. However, the Yetimote node is addressed to use traditional wireless networks (WSN), due to its size and specific physical format.
The objective of this project was to adapt this node for evaluating and developing WBAN networks. To achieve this goal, one of the main printed circuit boards of the Yetimote node, called Cerberus, which is in fact the part in charge of carrying the wireless communications out, has been modified to make it more wearable.
On the other hand, the context of the project has been analyzed in more detail, describing WBAN networks in depth, the most common characteristics of these networks and their different usages. After a detailed analysis of the requirements to be fulfilled by the new board to be designed in the context of this work, a very deep study has been carried out about possible antennas to be used in this new solution. Finally, the specific choice of the antenna to be used in this work for each band was determined based on its characteristics. One of the electronic components which humans are more accustomed to is a wristwatch, so the PCB has been designed to be integrated inside an enclosure with this shape.
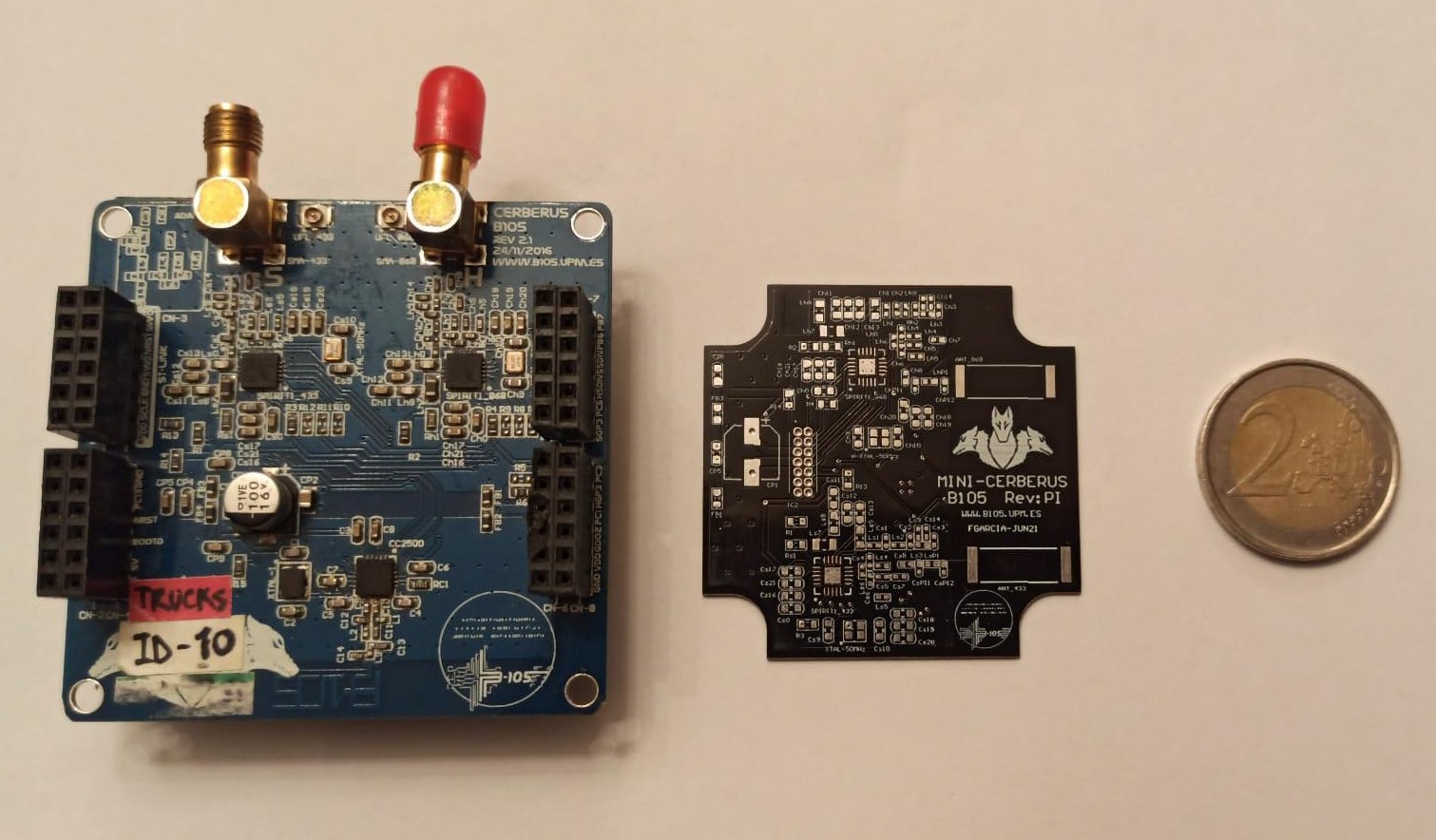
The next step was the electronic design and the PCB implementation of the new board called ‘Mini-Cerberus’, which has been designed using the Altium Designer tool. This new PCB will be connected to the rest of the Yetimote node through the board ‘Auxiliar’ which will be connected to the ‘Mini-Cerberus’ PCB through a flat cable. In addition, the ‘Mini-Cerberus’ board has several versions, one of them has a Pi-Network for each frequency band. Finally, the components were assembled using an industrial furnace and by manual welding. In the figure below, the previous ‘Cerberus’ PCB is shown in front of the new ‘Mini Cerberus’ prototype.
Additionally, some trials have been carried out in real environments to verify the correct operation of the developed design. Several tests have been performed in different real-world scenarios to study the performance of the new Mini-Cerberus board for different frequencies and transmission power values, and these results have been compared with those obtained for the original Cerberus board, which was used as reference or baseline.
In conclusion, it can be affirmed that the new ‘Mini-Cerberus’ PCB has a better performance in WBAN scenarios in the 433 MHz frequency band, while the 2,4 GHz frequency band has the worst performance of those studied. In relation to the Cerberus board, the new prototype has a lower performance compared to the original model, but this is an expected result due to the modifications made for its miniaturization