Envíanos tus preferencias y motivaciones hasta el 17 de semptiembre de 2023. A continuación, asignaremos los trabajos y nos pondremos en contacto con vosotr@s para empezar a trabajar cuanto antes.
Este curso estamos lanzados! Sacamos la convocatoria de becas antes de verano para que tengáis tiempo y os podáis organizar mejor.
Un curso más, dentro de las actividades de la Cátedra Securitas Direct – Verisure se contempla el establecimiento de un programa de becas en áreas de interés para la empresa y que complementen el proceso formativo de l@s estudiantes.
Por lo tanto, se lanza esta convocatoria de becas para el presente curso académico hasta completar las plazas.
Duración: 9 meses
Dedicación: 4 horas/día
Remuneración: 500 € / mes
Posibilidad de realizar el Trabajo Fin de Máster, Trabajo Fin de Grado y prácticas en empresas.
Interesad@s enviar un correo electrónico con el Curriculum Vitae y los temas de las becas a los que quiere optar indicando en el asunto [Becas Cátedra Securitas] a la siguiente dirección:
On July 13th, our colleague and lab member Santiago Real Valdés defended his PhD Thesis entitled “Network Design Strategies for Multisensory Human-Machine Interfaces of Navigation Systems for Blind and Visually Impaired People”. This work was carried out at B105 Electronic Systems Lab under the direction of Professor Alvaro Araujo.
The thesis defense took place at the ETSI Telecomunicación in Madrid. The work was evaluated positively earning the highest possible grade, along with the “cum laude” mention.
Overall, the research pursued design guidelines, tools, and methods for the development of networked navigation assistance systems for blind and visually impaired (BVI) individuals. Specifically, it resulted in the following contributions to the scientific community:
Study of the state-of-art at navigation assistance for BVI individuals. This was undertaken to re-evaluate the perspective of navigation systems for the blind and visually impaired (BVI) in a new technological-enabling context, attempting to integrate key elements of what is frequently a disaggregated multidisciplinary background.
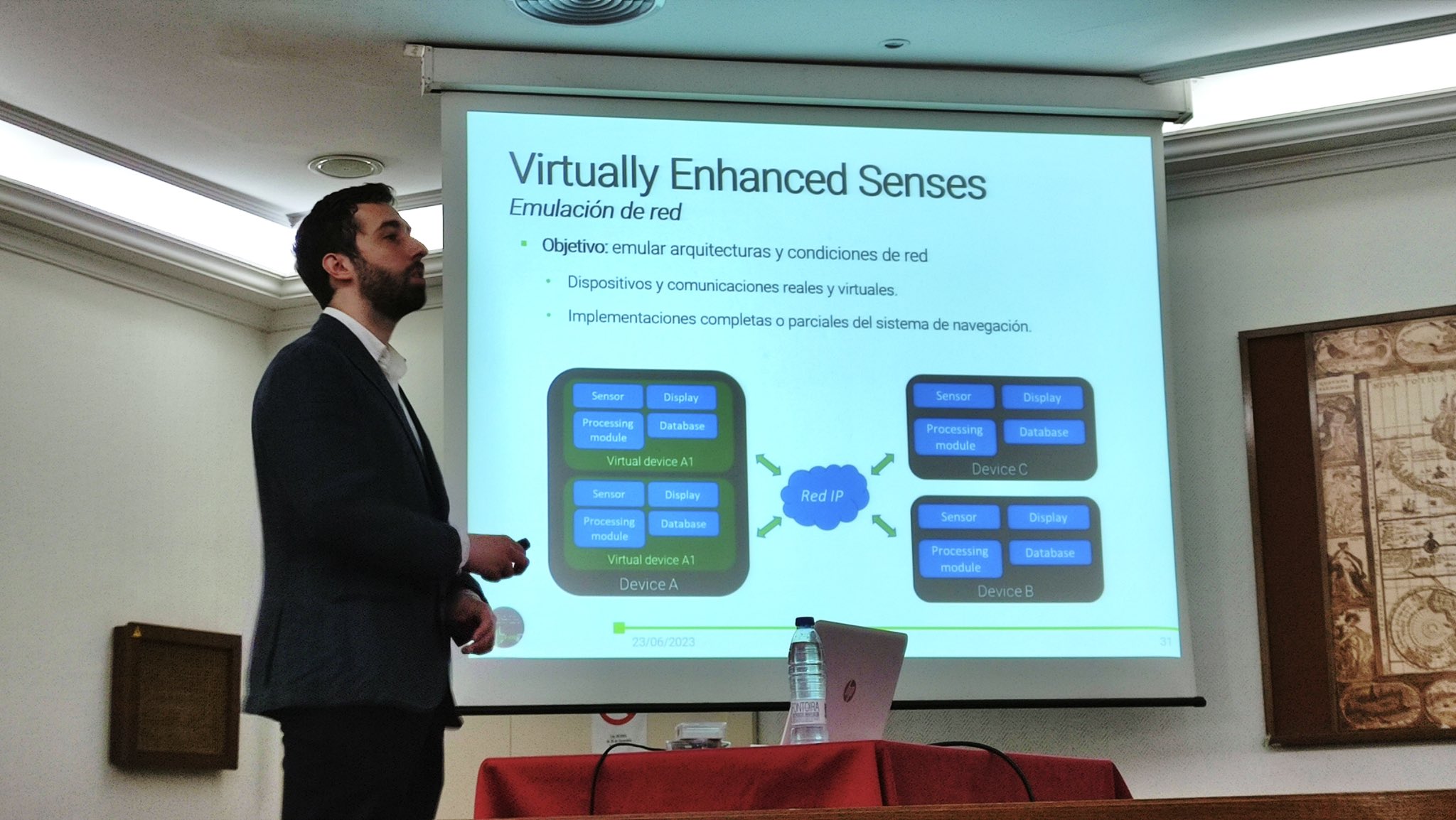
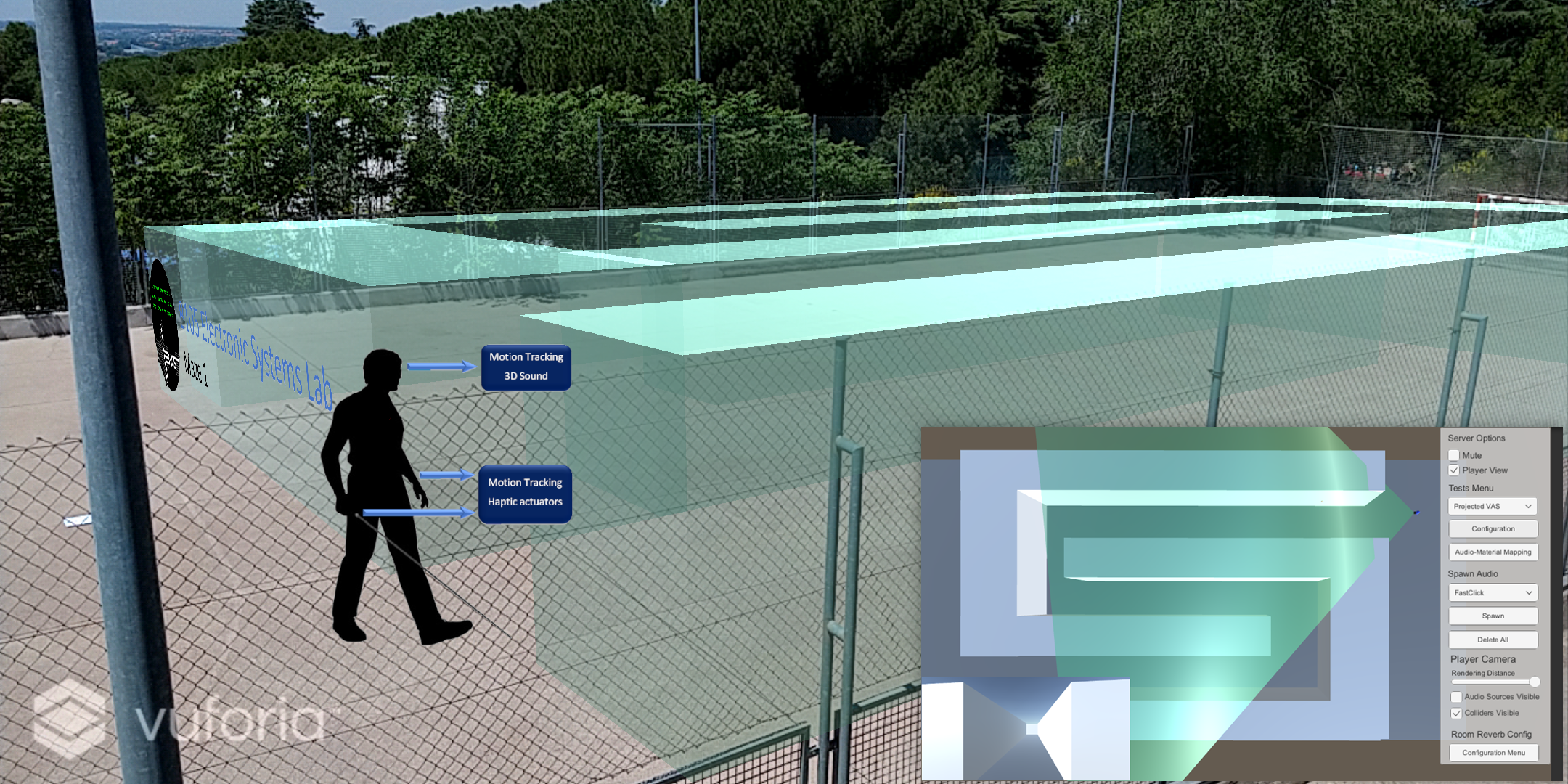
Development of the Virtually Enhanced Senses (VES) System. VES is a wireless, mixed-reality platform developed to design, emulate, implement, and test complete navigation systems.
Development of novel Sensory Substitution Devices (SSD) and methodologies to assess navigation assistance in mixed reality environments. Novel and representative SSD were implemented building on previous solutions, design guidelines and recommendations. Thereafter, new methodologies and performance markers were developed to quantify the performance of the SSD under various network architectures and operation conditions.
Novel relations between Quality-of-Experience (QoE) and Quality-of-Service (QoS) in navigation assistance for BVI individuals were found. Overall, a tradeoff was observed between the user’s spatial data acquisition and sensorimotor coupling degradation due to motion-to-photon delay.
Further information on the open-access VES system can be found at the following link. Also, the latest results were disseminated through the media:
El 24 de mayo hicimos una visita a la Brigada “Guadarrama” XII, junto a una representación del Equipo Directivo de la Escuela Técnica Superior de Ingenieros de Telecomunicación.
A las 10:00 dieron comienzo las actividades con la presentación del General Jefe de la Brigada sobre la organización, medios y misiones de la unidad.
La parte culminante de la visita fue la demostración dinámica de capacidades en la zona de combate urbanizada, durante la cual el personal de la universidad participó en un ejercicio de evacuación de personal no combatiente en una zona urbana con oposición de fuerzas irregulares.
Las actividades finalizaron con una exposición de algunas de las principales plataformas de combate de la brigada, el carro de combate “Leopardo 2E” y M-113, así como material, armamento y equipo individual.
According to Sociedad Española de Neurología (SEN), Parkinson’s disease prevalence and incidence is increasing and estimated that the number of people affected will double in 20 years and triple in 2050.
This project addresses a new research line that aims to use data generated from smart insoles to objectively support an early treatment of Parkinson disease (PD) and consequently improve the life quality of patients.
To achieve these common objectives the project is divided into two sub-projects with complementary objectives. In the first one (MyGait_Bio) the measurement systems to obtain BCG and IPG signals will be designed and the signal processing will be developed to reduce the influence of the movement artifacts and to be able to extract all the cardiovascular information from the patient. The system for recharging the batteries of the smart insole based on inductive methods will also be designed. This platform will combine inductive battery recharging with the reading of measurement data stored in the memory of the measurement system.
In the second sub-project (MyGait_Sensors) the aim is to develop intelligent insoles that will allow, by means of force and inertial sensors and advanced algorithms, to monitor the patient’s gait and provide personalised information on the patient’s evolution. This second project also aims to realize experimental tests with clinical supervision that will validate the technologic systems developed and obtain the maximum clinical information.
Title: MyGait: Mejora de la calidad de vida de enfermos de Parkinson a través de plantillas inteligentes multisensores Duration: September 2021 – August 2024 Partners: ISI (UPC), HOWLAB (UZ) y B105 (UPM). Financing entity: Proyectos de I+D+i Retos Investigación, Ministerio de Ciencia e Innovación (PID2020-116011RB-C22)